○発表のポイント:
◆これまでAUVのデータ(観測データや艇体情報)は、回収後にのみ確認可能でしたが、SummarAIを開発し、調査中でも取得データを確認可能にしました。
◆港からAUVを発進する運用が、新たなAUVの利活用につながる可能性を示しました。
◆海底ケーブルや送水管は、年月の経過とともに海底下に埋没し、画像では捉えることができず、正確な敷設位置の特定が困難になる場合が多いのですが、AUVにカメラと磁力計を搭載して調査することで正確な位置特定に成功しました。今後、港湾施設や洋上風力設備、生活に欠かせないインフラ設備の調査・検査への応用が期待されます。

○概要:
東京大学 生産技術研究所(所長 年吉 洋、以下東大生研)のソーントン ブレア教授は、OKIグループで海洋音響関連事業を手掛ける株式会社OKIコムエコーズ(代表取締役社長 大塚 竜治、以下OKIコムエコーズ)および株式会社ディープ・リッジ・テク(代表取締役 浦 環、以下ディープ・リッジ・テク)の3者共同でSummarAIを開発し、これまでAUVのデータ(観測データや艇体情報)は、回収後にのみ確認可能でしたが、調査中でも取得データを確認可能にしました。このことにより、港からAUVを発進する運用が、新たなAUVの利活用につながる可能性を示しました。
なお本成果は、内閣府総合海洋政策推進事務局「自律型無人探査機(AUV)利用実証事業」の公募事業に採択され、「港から発進して海底をマッピングするAUV(注1)と港から発進して目標物を精査するAUV調査の実証試験」を2025年12月に実施しました。
*本利用実証事業の目的、および「港から発進して海底をマッピングするAUVと港から発進して目標物を精査するAUV調査の実証試験」課題の背景や目的等については、関連情報をご参照ください。
○発表内容:
成果のポイントと今後の展望
航行型AUVを港から発進させ、海底マッピングを行い、自力で港へ戻ることに成功
カメラを搭載した航行型AUV(注2)が調査中に、取得した海底画像の海底の地形や底質などの重要な特徴をAIで抽出して、特徴的な代表画像のサマリを自動生成し、水中音響通信機能を通じて、支援船(見立てASV(注3))に転送するシステム「SummarAI(侍)」(注4)(図1)を開発し、航行型AUVに搭載して、機能を実証しました。
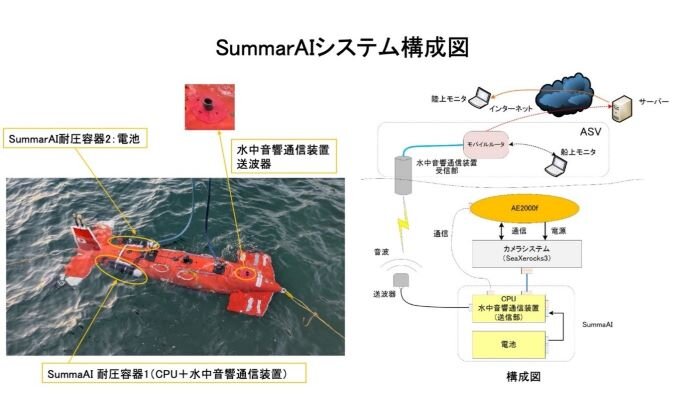
図1:SummarAIシステム構成図
これまでAUVのデータ(観測データや艇体情報)は、回収後にのみ確認可能でしたが、SummarAIを開発し、調査中でも取得データを確認することができました。
実証試験では、SummarAIを搭載した航行型AUV「AE2000f」(注5)(図2)が、AUV試験フィールド(注6)の港から発進して、調査海域まで高度40mで航走、調査海域では高度を6mにさげて調査を行い、調査終了後は、再び港へと航走しました(図3)。

図2:航行型AUV「AE2000f」
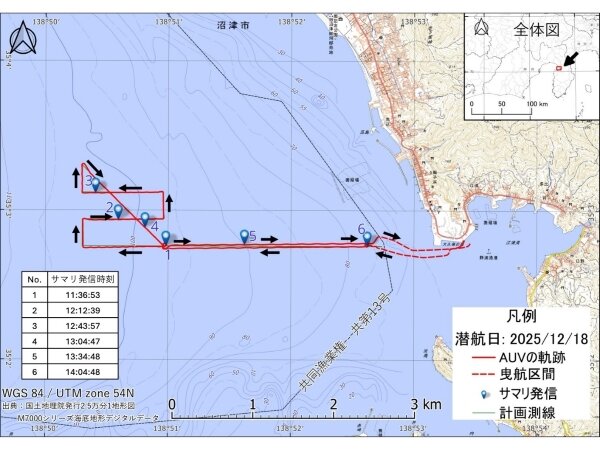
図3:「AE2000f」の航跡とサマリ発信地点(2025年12月18日)
調査開始から終了までの間、SummarAI は、30分ごとに、撮影した海底画像を自動解析して要約し(サマリを作ると呼びます)、水中音響通信機能を使ってサマリを支援船のPCに自動転送することに成功しました(図4)。さらに、サマリはインターネットを通じて支援船から陸上へと転送されました。
今後の展開が期待される「支援船フリーの航行型AUV」を用いた長時間の海洋底等の調査では、AUVが取得したデータをAUV自身が解析し、行動計画の変更などを行い、そのサマリを陸上オペレータに送ることができます。支援船フリーのAUV運用の実現に向けた確実な一歩を進め、新たなAUVの利活用につながる可能性を示しました。

図4.1:送られた観測サマリ1
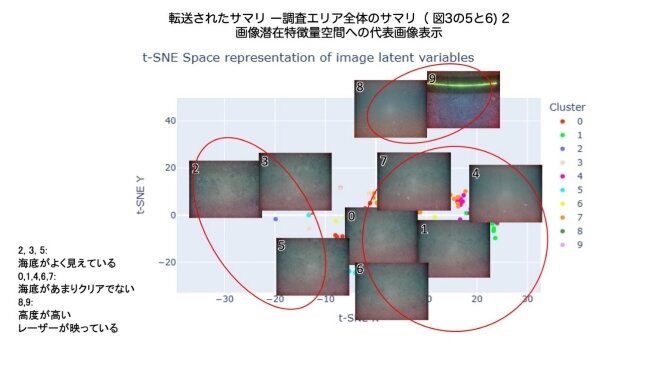
図4.2:送られた観測サマリ2
ホバリング型AUVを港から発進させ海底の人工物を精査して、自力で港へ戻ることに成功
狭い範囲を低高度から高精度・高分解能で調査することを得意とするホバリング型AUV(注7)は、水産資源を含む海底資源の調査に加え、港湾施設や洋上風力設備、海底ケーブル、送水管など、生活に欠かせないインフラ設備の調査・検査への応用が期待されます。
特に海底ケーブルや送水管は、年月の経過とともに海底下に埋没し、画像では捉えることができず、正確な敷設位置の特定が困難になる場合があります。しかし、埋没していても磁力計に反応するため、AUVが安定した姿勢を保ちながら低高度で計測を行うことで、その位置を特定することが可能です。
このことから、姿勢の安定したホバリング型AUV「BOSS-A」(注8)(図5)に新たに磁力計(注9)を搭載し、磁力計とカメラによるマルチモーダルな計測により、送水管の正確な位置を取得する実証試験を行い、これに成功しました。

図5:ホバリング型AUV「BOSS-A」
本実証実験では、江浦湾の静浦港から対岸の内浦港に向けて昭和56年に敷設された海底送水管のおおよその位置情報を基に、AUVは港から自律航行で発進して、高度1.5mを保って、当時の敷設位置を中心に70m幅のジグザグに航走して往復し、送水管の調査を行い、出発地点に戻りました(図6)。

図6:「BOSS-A」の送水管調査時の航跡(2025年12月19日)
送水管は、海底下に埋もれており、画像による検出は困難でしたが、磁力計が反応した位置情報を基に、送水管の正確な位置を推定することに成功しました。その結果、送水管は、敷設当時の工事計画に基づく想定位置から東に30mずれて設置されていることが明らかになりました(図7)。
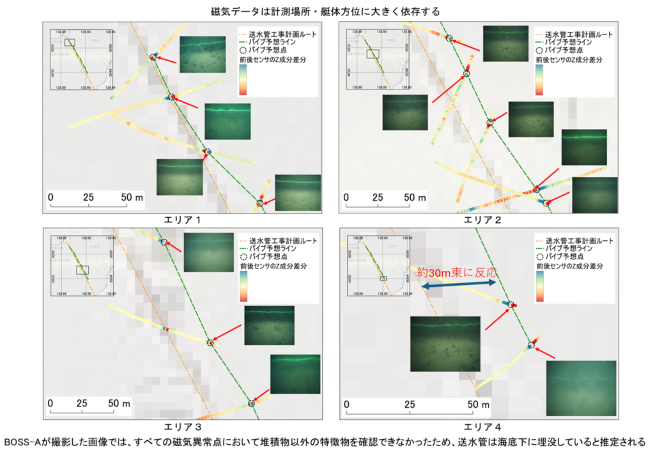
図7:磁気データから送水管の正確な位置を特定
磁力計の精度検証のため、海底に鉄パイプを設置して、カメラ画像で捉えたパイプの位置と磁力計の反応があった箇所が一致することを確認できました (図8)。
カメラの3D画像からは、鉄パイプの位置情報に加え、砂に一部覆われた外観の状態や寸法などの詳細な情報を取得することができます(図8)。
本研究により、ホバリング型AUVを用いたインフラ設備の調査において、対象物のおおよその位置情報が得られていれば、インフラの特性に応じた適切なセンサを組み合わせることで、その正確な位置を特定できることが実証されました。本成果は、今後のホバリング型AUVのインフラ設備調査への幅広い応用可能性を示すものです。

図8:「BOSS-A」のカメラ映像に映る模擬パイプと磁気マップの位置が一致
画像から模擬パイプはうっすらと砂を被り、左端は埋もれていることが分かる
実証試験概要(図9)
2025年12月15日〜20日まで、調査船の支援なしで港から発進するAUVを実現するために、2種類のAUVに以下の行動を行わせる実証試験を江浦湾の試験フィールドにて、以下のスケジュールにて実施しました。

1)航行型AUV「AE2000f」のミッション:
航行型AUV「AE2000f」は、漁業権と港内の船舶の往来を考慮して、江浦湾の静浦港の岸壁からクレーンで吊り下ろし、共同漁業権の範囲外まで警戒船で曳行して、その場でリリースする。AUVは、調査海域(100m水深海域)まで、高度40mで自律航走し、調査海域に到達したら、高度を6mにさげて、観測を開始する。観測開始から30分ごとに、取得した海底画像の特徴画像のサマリを支援船(自律無人船ASVに見立てている)に水中音響通信装置を使って自動転送する。観測終了後は、高度40mでリリース地点に自律航走で戻り浮上する。浮上後は、警戒船で港に曳航する。
2) ホバリング型AUV「BOSS-A」のミッション:
ホバリングAUV「BOSS-A」は、当時の敷設位置情報を基に、送水管を中心に70m幅で対岸の内浦港の手前400m付近(漁業権外)までジグザグのルートを設定して航走する。AUVを岸壁からクレーンで吊り下ろし、その場でリリースする。AUVは、観測開始地点からは高度を1.5mに下げて、画像と磁場データを取得する。海底下に埋もれていると想定される送水管の位置を磁力計により高精度に推定できることを実証するため、送水管模擬パイプ(鉄鋼パイプ:SS材:φ150mm、長さ5.5m)を海底に設置して、カメラ画像と磁力計によるマルチモーダルな計測により、カメラ画像で捉えたパイプの位置と磁力計の反応があった箇所が一致することを検証する。
3)見学会
最終日、地元の小中学生など一般の方をAUV実証試験に招待し、実物のAUVに触れてもらい、海中ロボットとその役割についての理解と共感を深める。


図9:実証試験概要 航行型AUV実証試験概要(上)、ホバリング型AUV実証試験概要(下)
〇関連情報:
・内閣府総合海洋政策推進事業部
自律型無人探査機(AUV)利用実証試験
URL: https://www8.cao.go.jp/ocean/policies/auv/auv_pilot_project/pilot_index.html#20250610
・AUV官民プラットフォーム
URL:https://www8.cao.go.jp/ocean/policies/auv/call_for_participants/auv_index.html
・東京大学 生産技術研究所
【トピックス】内閣府の「自律型無人探査機(AUV)利用実証試験」に採択〜港から発進して海底をマッピングするAUVと港から発進して目標物を精査するAUV調査〜(2025.07.29)
URL:https://www.iis.u-tokyo.ac.jp/ja/news/4836/
【トピックス】AUVによる道東太平洋沖における深海生物資源の分布状況を把握する調査を開始します(2025.3.26)
URL: https://www.iis.u-tokyo.ac.jp/ja/news/4723/
【記者発表】世界初の大規模調査!3台のロボットが連携し、海底3次元画像を取得 ~コバルトリッチクラストの賦存状況の調査への貢献に期待~(2019.03.29)
URL: https://www.iis.u-tokyo.ac.jp/ja/news/3079/
〇用語解説:
(注1)自律型無人水中探査機(AUV:Autonomous Underwater Vehicle)
動力源を持ち、プロペラ等を用いてあらかじめ決められたルートに沿って全自動で海中を観測する装置。ROV(Remotely Operated Vehicle)のようにケーブルがついていないので、自由な行動ができる。大深度の調査では、ケーブルがついていないことで、ROVに必要な大きなケーブルハンドリング装置が必要でなく、頻繁な展開が可能である。
(注2)航行型AUV
航行型AUVは広範囲を高速(2~4ノット程度)で航行することをミッションとする。
(注3)自律型無人水上探査機(ASV: Autonomous Surface Vehicle)
GPSやセンサを使って無人で海上や湖、河川などを自律航行し、海洋調査やモニタリング、データ収集を行う。AUVと組み合わせて使い、AUVの位置補正、AUVの艇体情報や取得データを陸上に転送するなど、AUV支援システムとしての活躍が期待される。今回の実証試験では、支援船をASVに見立てて利用した。
(注4) SummarAI(侍)
カメラを搭載するAUVが調査中に、取得した画像の海底の地形や底質などの重要な特徴をAIで抽出して、特徴的な代表画像のサマリを自動生成し、水中音響通信機能を通じて、陸上に転送するシステム。AUVとはLAN接続することで使用できるスタンドアローンなシステムである。
(注5) 航行型AUV「AE2000f」
重量約370kgの中型航行型AUV。観測センサとして、高高度3次元画像マッピング装置を搭載する。本実証試験では、開発したSummarAI(侍)システムを新たに搭載して調査を実施した。
(注6) 試験フィールド
本実証試験におけるAUVの着揚収基地は、静浦港土佐谷組ヤード岸壁を借用して実施する。
航行型AUVは、基地から水深100m海域、ホバリング型AUVは、基地から水深50mの送水管敷設エリアを航走する。本実証試験に際しては、事前に周辺漁協、マリーナ他関係各所へ海上試験の知らせを実施すると共に、AUVが航走する際は、安全確保のためのAUV水中位置監視船と往来船への注意喚起を行うための警戒船を配置する。
(注7) ホバリング型AUV
多くの推進器を持ち運動自由度が高く、海底への接近、定点保持、その場回頭やその場上下運動が可能なAUV。調査対象に接近して詳細観測することを主要ミッションとする。
(注8) ホバリング型 AUV「BOSS-A」
重量約600kgの中型ホバリング型AUV。観測センサとして、クラストの音響厚み計測装置と低高度3次元画像マッピング装置を搭載し、1.5m高度から全自動計測を行う。ペイロードスペースを広く取っているため、観測センサを入れ替えて別のセンサを搭載して別ミッションへの対応が可能であり、本実証試験では、磁力計3式を追加搭載して送水管の調査を実施した。
(注9) 磁力計
観測点の磁力を計測することができるセンサ(Bartington社製「Mag-03」)。送水管の保護に使用されている鉄線外装は磁性体であり、地磁気に反応して周囲に磁場変化をもたらす。送水管により発生する磁場変化は、地磁気約45μTに対して1/100以下と非常に小さい変動の観測を求められるが、機体の前後にセンサを2台配置して、その差分を測定することにより、AUVの姿勢変動や地磁気の時間的変動による影響を無視した計測を実施した。
○問い合わせ先:
東京大学 生産技術研究所
ソーントン研究室 特任研究員 杉松 治美(すぎまつ はるみ)
Tel:03-5452-6487
E-mail:harumis(末尾に"@iis.u-tokyo.ac.jp"をつけてください)