○発表者:
ソーントン ブレア(東京大学 生産技術研究所 准教授)
○発表のポイント:
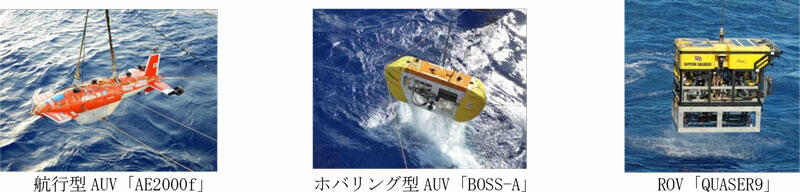
◆航行型AUV「AE2000f」とROVを用いて、海底面の連続的な高高度3次元画像マッピングを行い、海底面の形状、底質、クラスト被覆状態、棲息生物などの情報を含むデータを、距離にして約79km、面積にして1平方キロメートル分取得しました。
◆一部の領域では、クラスト賦存量調査を目的に開発されたホバリング型AUV「BOSS-A」を用いて、海底面の連続的な低高度3次元画像マッピングおよびクラスト音響厚み計測を同時に行い、距離にして18.3km、面積約0.03平方キロメートル分のデータを取得しました。
◆「BOSS-A」取得データの解析から、厚いクラストが連続的に分布すると推定された領域では、高高度3次元画像マッピングを実施し、広域かつ詳細なマルチレゾリューショナルなデータを取得しました。今後、統合解析により広範囲の正確なクラストの被覆率を算出することが期待されます。
○発表概要:
東京大学 生産技術研究所 ソーントン ブレア 准教授の研究チームは、独立行政法人 石油天然ガス・金属鉱物資源機構(JOGMEC)の委託(注1)を受け、コバルトリッチクラスト(以下、「クラスト」、注2)が分布する、南鳥島南西の拓洋第5海山において、1平方キロメートルにおよぶ面積の海底面の3次元画像を、航行型とホバリング型の2種類のAUV(Autonomous Underwater Vehicle:自律型海中ロボット(注3)およびROV(Remotely Operated vehicle: 遠隔操作無人探査機(注4)を用いて、短期間のうちに効率的に取得しました。
航行型AUV「AE2000f」(注5)に搭載した3次元画像マッピング装置(注6)、ホバリング型AUV「BOSS-A」(注7、注8)およびクラスト厚み計測装置(注9)は、東京大学 生産技術研究所が文部科学省の「海洋資源の利用促進に向けた基盤ツール開発プログラム」において、クラスト賦存量の計測を目的として平成20年度から開発したもので、これまでも拓洋第5海山で調査を実施してきました。今回の調査で初めて大規模に実施し、非常に多くの3次元画像データとクラスト厚みの連続データを取得することができました。
今回、面積にして1平方キロメートルにおよぶ、世界初の大規模な海底調査を達成したことで、クラストの被覆状況を効率的に調査できる手法を実現したといえます。また、得られたデータは、拓洋第5海山のクラスト賦存量を正確に推定するための基礎データになることが期待されます。

○発表内容:
拓洋第5海山の水深900m〜1,500m程度の平頂部および肩部にかけての直線を主とする計画測線において、2018年11月13日〜12月4日の航海期間中(現場海域での調査実施期間:11月18日〜29日)、高高度3次元画像マッピング装置を搭載する航行型AUV「AE2000f」(昼間)とROV「QUASAR9(日本サルヴェージ株式会社所有)」(夜間)を用いた海底面の広域連続計測調査(10m高度、計測幅10m、cm分解能)、および低高度3次元画像マッピング装置と音響厚み計測装置を搭載するホバリング型AUV「BOSS-A」(昼間)を用いた海底面の詳細連続計測調査(2m高度、計測幅2m、mm分解能)を実施しました。
潜航回数は、「BOSS-A」は6回、「AE2000f」は5回、そしてROV「QUASAR9」は11回です。
3台のロボット全体で、距離にして138km(BOSS-A: 18.3km、AE2000f: 71.8km、ROV: 47.9km)、面積にして約1平方キロメートル(BOSS-A:0.03平方キロメートル、AE2000f: 0.7平方キロメートル、ROV: 0.3平方キロメートル)のデータを取得しました。
海山の南西の肩部にかけての測線を航走した「BOSS-A」の調査では、現場での3次元画像マッピングの解析結果から、計測場所ごとにクラスト分布の特徴に変化が見られました(図1、図2)。音響厚み計測装置のデータの計測結果から、連続的なクラストの被覆及び厚みが分かりました(図3)。
そこで、翌日の夜のROV調査では、クラストが被覆する箇所を調査するため、BOSS-Aの潜航測線と重なる測線を航走させる調査計画を立てました。写真に示すように、ROVが取得した高度10mからの3次元画像データ(図4)は、BOSS-Aのデータ(図5)と重なる部分が見られます(図6)。今後、統合解析により、クラスト賦存量の推定をより正確にすることが期待されます。
また、BOSS-Aで撮られた画像に写っている生物はROVの画像にでもほぼ同じ位置に写っており、数時間・日ではほとんど動いていないことが分かります。このように、取得した3次元画像データは、クラストの厚みや被覆率を計測できるだけでなく、海底面の詳細な形状、底質そして棲息生物などの多元的な情報を含んでおり、環境影響評価調査などにも応用されることが期待されます。
○問い合わせ先:
東京大学 生産技術研究所
特任研究員 杉松 治美(すぎまつ はるみ)
Tel:03-5452-6487 Fax:03-5452-6489
○用語解説:
注1)JOGMEC委託事業
本調査は、2018年5月25日にJOGMECが公募した委託事業「平成30年度海洋鉱物資源調査に係るコバルトリッチクラスト賦存状況調査」を受託し実施した。JOGMECは経済産業省の委託を受け、コバルトリッチクラストの調査を実施している。
注2)コバルトリッチクラスト
鉄とマンガンの酸化物からなる海水起源の化学堆積岩。学術的にはマンガンクラスト、鉄マンガンクラストと呼ばれることが多い。海山や平頂海山などの海底において、数cm〜10数cmの厚さで基盤をカバーしており、広い範囲にわたって分布していることが知られている。コバルト(Co)、ニッケル、白金などを含んでいる。
注3)自律型海中ロボット(AUV:Autonomous Underwater Vehicle)
動力源を持ち、プロペラなどを用いてあらかじめ決められたルートに沿って無索で全自動で海中を観測する装置。
注4)遠隔操作無人探査機(ROV:Remotely Operated vehicle)
遠隔操縦式の探査機。ケーブルで探査機とオペレーションシステムがつながれており電力や各種指令を探査機に送り、海底の映像などの情報をリアルタイムで陸上や母船に伝送する。
注5)AE2000f
重量約370kgの中型航行型AUV。観測センサとして、高高度3次元画像マッピング装置を搭載する。
注6)3次元画像マッピング装置
海底の3次元画像マッピングを行う計測装置。カメラ、シート状のレーザおよびフラッシュの組み合わせにより構成され、AUVやROVに搭載して、ロボット側のナビゲーションセンサ情報により制御を行い、1.5〜10m程度の高度から海底面の高精度の3次元画像マップを作成することができる。ロボットにナビゲーションセンサが搭載されていいない場合には、別途つなげることが可能である。
注7)BOSS-A
重量約600kgの中型ホバリング型AUV。観測センサとして、クラストの音響厚み計測装置と低高度3次元画像マッピング装置を搭載し、1.5m高度から全自動計測を行う。ペイロードスペースを広く取っているため、観測センサを入れ替えて別のセンサを搭載して別ミッションへの対応が可能である。
注8)ホバリング型AUV
広範囲を高速で航行することをミッションとする航行型AUVと異なり、運動自由度が高く、定点保持・その場回頭、その場での上下運動が可能なAUV。対象を詳細観測することを主要ミッションとする。
注9)クラスト厚み計測装置
「BOSS-A」には、ジンバル制御を行う音響厚み計測装置が搭載されている。パラメトリック効果で発する200kHz(2次波)の音響ビームを高度1〜2mで海底面にビームの焦点を自動的に合わせる。ターゲットにあたるビームの直径は20mm程度で、海底下30cmまでの内部構造を計測できる。ジンバル制御により超音波が海底面に対して直角に入射するよう自動的に角度を制御する。
○添付資料: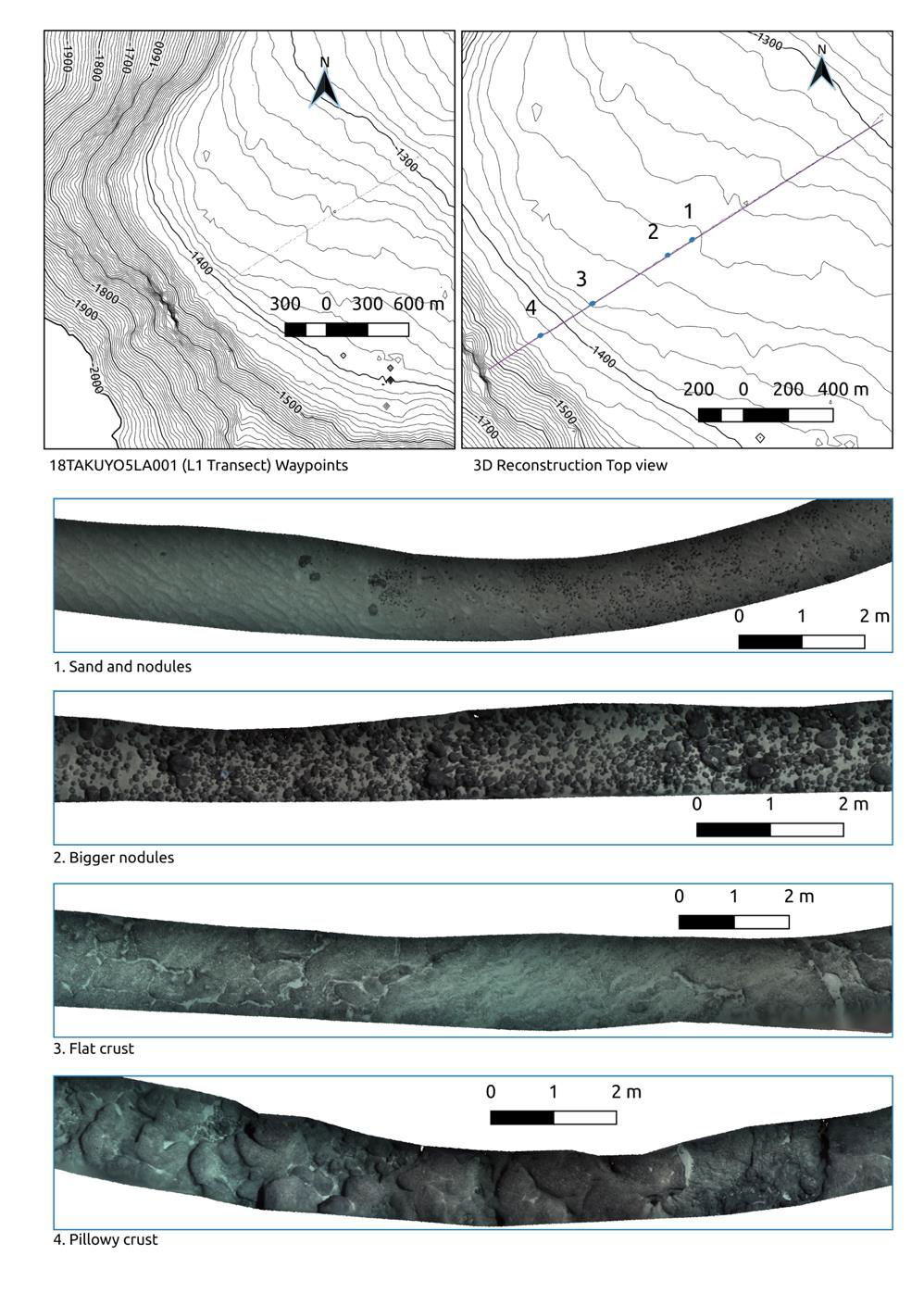
図1 海山の南西の肩部を下るBOSS-Aの調査では、場所毎にクラスト分布の特徴に変化が見られる。
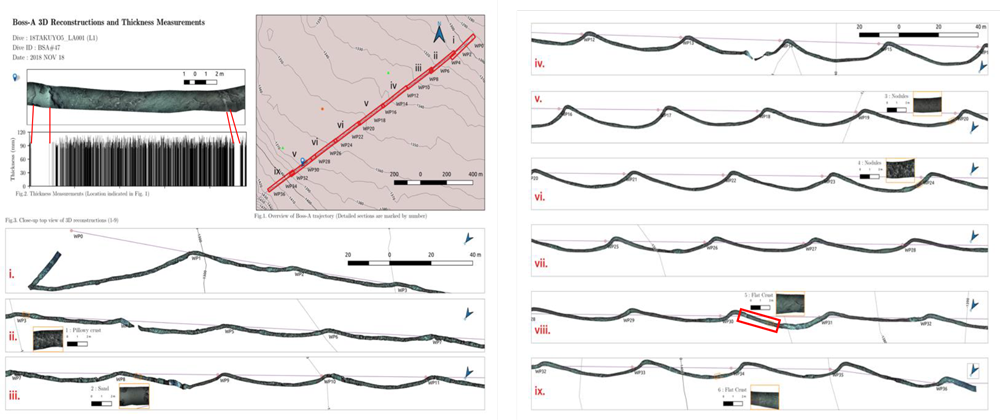
図2 BOSS-Aの計測測線と低高度3次元画像マッピングデータ。右図の枠で示すクラストが被覆する箇所について、クラストの厚み計測データの値を示す(左上の右図)。
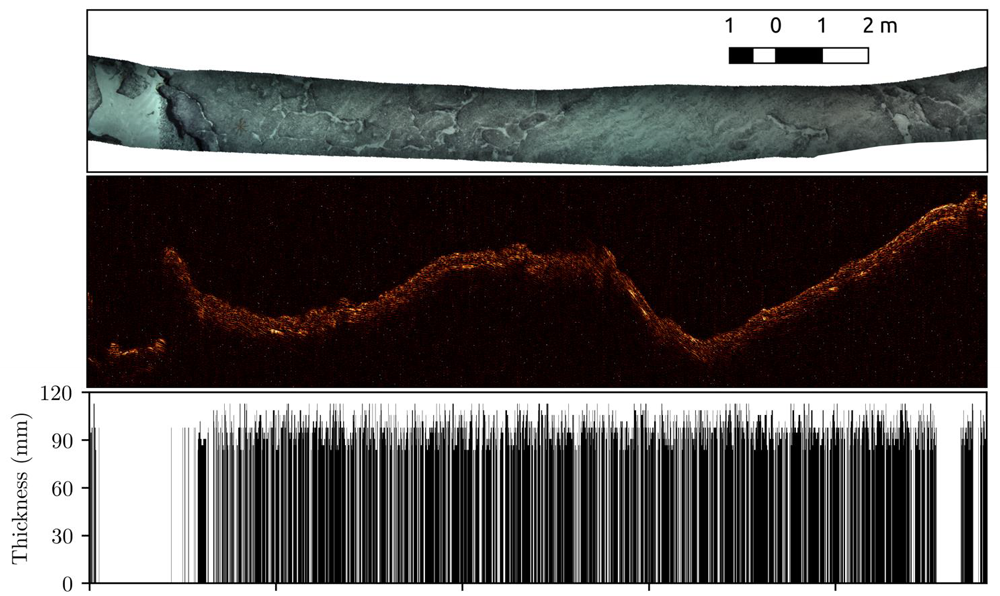
図3 図2の音響厚み計測データの拡大図、クラスト分布が連続する箇所(ロボットの計測時間軸に沿ったデータ表示)の拡大図(上図)、音響厚みデータ(中図)、音響厚み計測解析結果(下図)、音響厚み計測結果では砂地とクラスト被覆部の差がはっきりと示される。
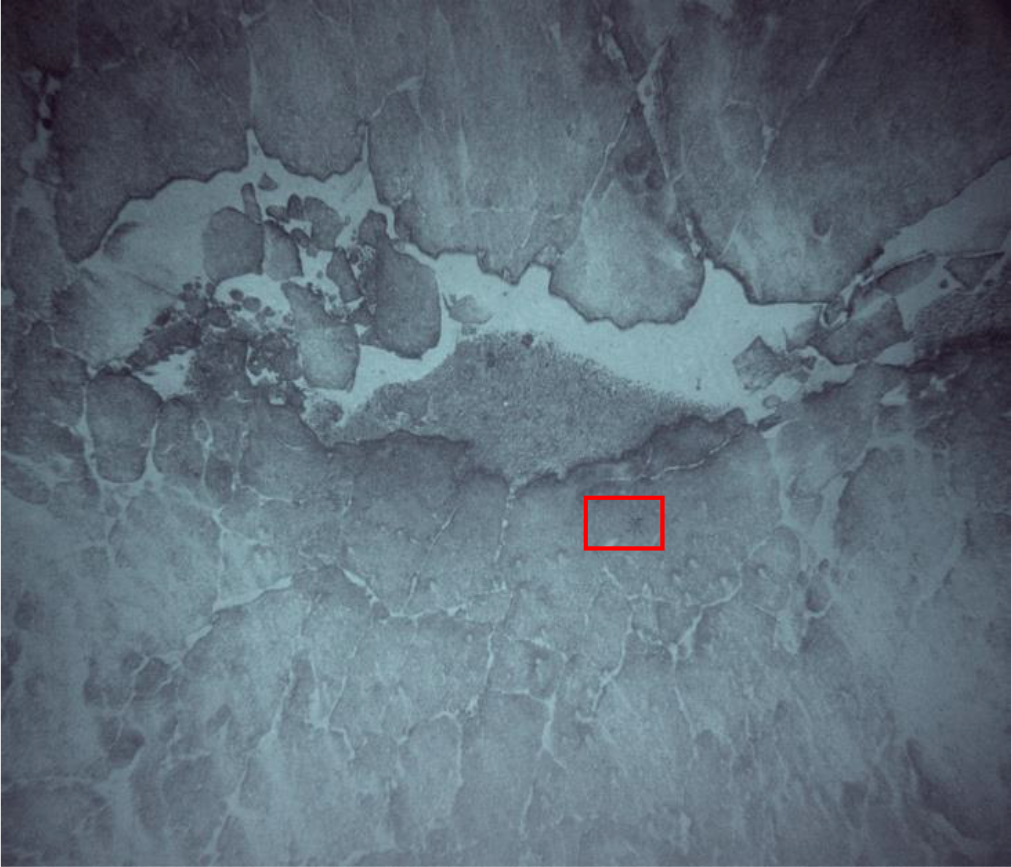
図4 BOSS-Aの調査と重なる測線を航走したROVの調査で取得したデータ。枠内に生物が写っている(図5、図6参照)。

図5 BOSS-Aの調査で取得したデータのうち、クラストが連続的に被覆する箇所のデータ。
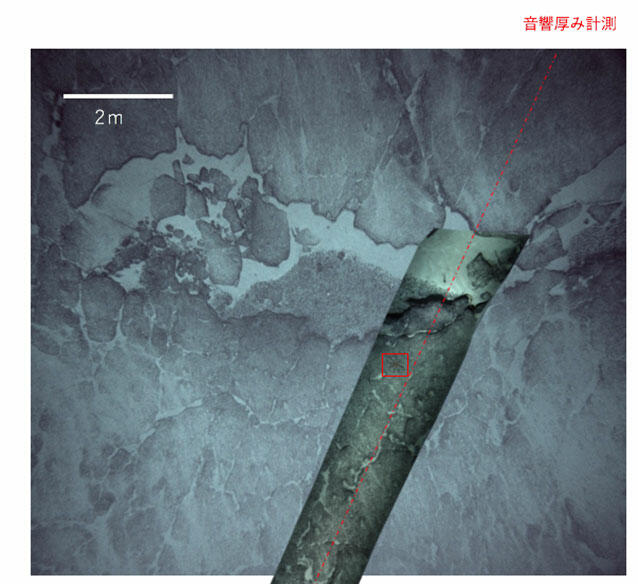
図6 図4と図5のデータはぴったりと重なる、また、両方の画像に写っている底生生物の位置はほとんど変わらない。