○発表のポイント:
◆海面に着水している無人航空機(UAV)によって海底位置をセンチメートル精度で計測することに、世界で初めて成功した。
◆飛行艇型UAVを活用した高精度な海底観測は、高速・高効率・リアルタイムに海底情報を取得する基盤の構築に貢献する。
◆南海トラフ巨大地震などの地震災害対策に必要な情報を迅速かつ高頻度に取得することで、地震防災研究の進展が期待される。

海面を移動するUAV
○概要:
東京大学 生産技術研究所の横田 裕輔 准教授と株式会社ハマは共同で、UAV(Unmanned Aerial Vehicle、注1)搭載用の海底通信装置を高度化し、海面に着水したUAVによって1,000m以深の深海底のセンチメートル精度での位置計測することに、世界で初めて成功した。今回の成果により、船を使用しない高精度の海底位置計測が可能になり、従来の観測手法に比べると、高頻度化・低コスト化の点で、海底の位置計測に重要な進展をもたらした。
○発表者コメント:横田 裕輔 准教授の「もしかする未来」
海底を計測するためには、昔から船で現場の海面まで行くのが主流です。初めて船で観測に行った時、21世紀にいつまでもこんな時間と手間のかかることをやっていては海洋観測の革新はありえないと思ったことを覚えています。本研究のようなUAVによる海面プラットフォーム問題の解決は次世代の海洋把握のために不可欠であると考えています。今回の成果を踏まえて、より簡便で、安価な海洋観測の実現を目指して研究を進めていきます。
○発表内容:
地震学や地質学における海洋音響通信による海底の地形や位置の把握、生物学・海洋学・火山学における海水サンプルの取得、深海洋ロボットの投入と回収など、観測装置を用いた海洋・海底計測には、船舶やブイが用いられる。しかし、船舶にはコスト(大型船舶の場合、100万円/日以上の燃料・人工費がかかる)や機動性(一般的な船舶の場合、20km/h程度)の点に課題があること、ブイには海面位置の保持能力に限界があることが、多くの海洋・海底計測の頻度向上においてボトルネックとなっている。特に、近年は南海トラフなどプレート境界で発生する地震のメカニズム解明および地震災害対策のため、海底の微小な地殻変動を高頻度かつ高精度に計測することが求められている。
2022年には、東京大学 生産技術研究所の横田 裕輔 准教授、株式会社ハマは共同で、海面に着水しているUAVによる深海底の観測を行うことに成功した(関連情報参照)。本知見をもとに、今回、GNSSアンテナ、音響ソナーをはじめとする各種機器と解析の高精度解析手法を確立し、UAVによるセンチメートルレベルの高精度な海底位置計測技術を実現した。
本実験で用いたUAV(図1)は、株式会社ハマにより新たに開発された飛行艇型UAV HAMADORI6000新モデルであり、翼幅6.3mのボディにガソリンエンジンを搭載し、機体の大型化を実現しつつ、90 km/h以上の速度で330 kmの飛行が可能となった。さらに、観測機器(ペイロード)の一部は、民生用ドローンで一般的に採用される非測量用機器が利用されており、観測機器のコスト低減にも成功している。

図1:実験時のUAVの写真
深海底の位置計測は、音響によって海底に設置された海底音響基準局(注2)との通信および測距を繰り返すことで行われる。まず、東京大学生産技術研究所の海洋工学水槽にてUAVに搭載されている音響装置を用いた水中の距離計測実験を行った結果、約2cm以内の精度で計測を行うことが可能であると示された(図2)。

図2:水槽試験の様子。水面側がUAV筐体(翼なし)、水槽底に模擬海底基準局が設置されている。
次に、相模湾において、UAVを用いた海底位置計測実験を行った。実験は大きな波や風はない理想的な環境で行われた。実験の結果、海底位置がセンチメートル精度で特定できることが実証された(図3)。この実験結果により、船舶を使用せずに低コストかつ迅速に海底の位置を測定できることが示唆され、地震発生直後の迅速な海底変動の把握や、より頻繁な長期モニタリングへの応用が期待される。
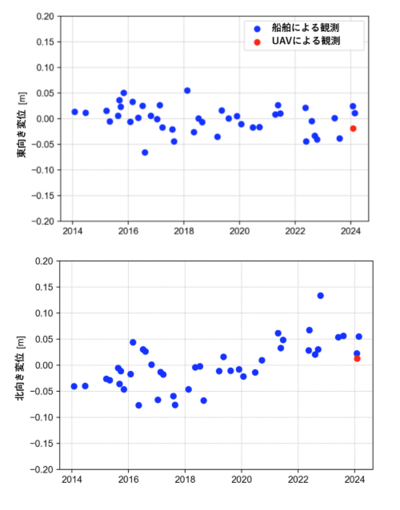
図3:計測された海底局位置。船舶による計測結果と同程度の性能を実現した。
青い丸は、船舶を使用してこれまで定期的に行ってきた計測結果。赤い丸は今回の計測結果。
船に比べて圧倒的な機動性を持つ飛行艇型UAVによる高精度海底観測の成功は、南海トラフ巨大地震などの地震災害対策に必要な海底情報の迅速な取得の基盤の実現に大きく貢献するものである。今回の成果を踏まえ、風浪等の気象・海象条件が理想的でない環境下での計測など、今後もさらにシステムの改良と実運用に向けた展開を予定している。
○関連情報:
プレスリリース「海面に着水したUAVによる深海底観測に成功~船やブイに依存せず、高速・高効率・リアルタイムな観測へ~」(2022/11/18)
○発表者・研究者等情報:
東京大学
生産技術研究所
横田 裕輔 准教授
大学院新領域創成科学研究科 海洋技術環境学専攻
吉住 優憧 博士課程
株式会社ハマ
金田 政太 代表取締役
○論文情報:
〈雑誌名〉Earth and Space Science
〈題名〉Construction and Demonstration of a Seaplane-type UAV-based High-Precision GNSS-A Seafloor Crustal Deformation Observation System
〈著者名〉Y. Yoshizumi*, Y. Yokota, M. Kaneda, S. Yamaura, Y. Kameta, T. Inoue, and K. Kouno
〈DOI〉10.1029/2025EA004237
○研究助成:
本研究は、公益財団法人セコム科学技術振興財団、科研費「学術変革A"Slow-to-Fast 地震学"(課題番号:JP21H05200)」の支援により実施されました。
○用語解説:
(注1)UAV
Unmanned Aerial Vehicle の略。無人航空機を指す。大別してヘリコプタータイプと飛行機型があり、本プレスリリースでは、飛行機型のうち海面離着水する飛行艇型を用いた。
(注2)海底音響基準局
受信した音響信号をそのままの形で返信する海底機器(ミラートランスポンダ)。本実験では、海上保安庁が運用する海底地殻変動観測網(SGO-A、注3)の相模湾(SAGA)観測点の海底音響基準局を使用した。
(注3)海底地殻変動観測網(SGO-A)
Seafloor Geodetic Observation-Arrayの略。海上保安庁が海底地殻変動を観測するために日本海溝や南海トラフ沿いに設置している観測網を指す。
○問い合わせ先:
〈研究に関する問い合わせ〉
東京大学 生産技術研究所
准教授 横田 裕輔(よこた ゆうすけ)
Tel:03-5452-6188
E-mail:yyokota(末尾に"@iis.u-tokyo.ac.jp"をつけてください)
URL:https://sgoi.iis.u-tokyo.ac.jp/
株式会社ハマ
代表取締役 金田 政太(かねだ まさた)
Tel:0244-26-6208
E-mail:masata.kaneda(末尾に"@hamakk.jp"をつけてください)
〈報道に関する問い合わせ〉
東京大学 生産技術研究所 広報室
Tel:03-5452-6738
E-mail:pro(末尾に"@iis.u-tokyo.ac.jp"をつけてください)
株式会社ハマ
総務部 花岡 高行(はなおか たかゆき)
Tel:0244-26-6208
E-mail:info(末尾に"@hamakk.jp"をつけてください)
URL:https://www.hamakk.jp/