株式会社ワールドスキャンプロジェクト(本社:東京都新宿区、代表取締役:上瀧良平、以下「ワールドスキャン」)と東京大学 生産技術研究所(東京都目黒区、所長:年吉 洋、以下「東大生研」)のソーントン・ブレア准教授らの研究チームは共同で、海底に眠るレアメタル資源の発見を目的とした探査システムの研究を行っています。
本研究チームは、ワールドスキャンが開発した新型磁気センサ(金属探知センサ)と東大生研ソーントン研究室が開発した3D画像マッピングシステムを有索遠隔操縦ロボット(ROV:Remotely Operated Vehicle)に搭載し、海底に存在する磁気反応を詳細に調査し、深海環境におけるレアメタル資源に関する情報を取得して解析するためのシステムを共同開発しました。2023年に、資源が有望視されている1700mの海底において、磁気データの取得に成功しました。
深海3000mに行ける深海調査用の大型ROVに取り付けられた新型磁気センサ
<共同研究の成果と今後の展望>
■海底磁気調査の成果成功
本研究チームは、海底磁気調査を行い、深海1700mで新型磁気センサ「ジカイ」(注1)を活用して海底での磁気異常計測に成功しました。
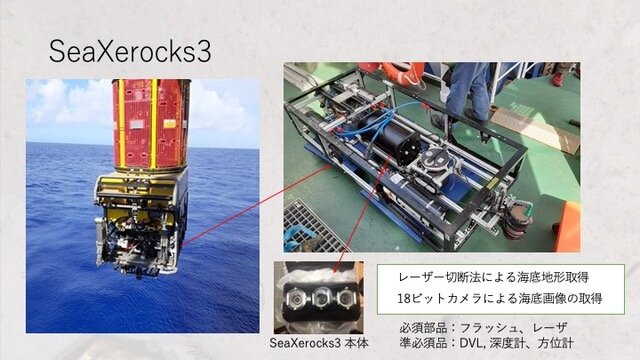
「ジカイ」は磁気検出能力を活用し、海底の磁気異常を詳細に調査できるセンサです。一方、東大生研 ソーントン研究室が開発した3D画像マッピングシステム「SeaXerocks3」(注2)は、海洋底の高精度な位置(緯度経度)、底質および微地形を測定することができます。2023年、ROVによる海底磁気調査では、「ジカイ」とSeaXerocks3とをROVに搭載して計測を行い、深海1700mで「ジカイ」による海底での磁気異常計測に成功しました。SeaXerocks3が取得した当該位置、底質および微地形データと磁気異常データの相関を解析することで、磁気異常データの性質を評価しています。
■今後の展望
【海底資源マップ作成】
深海には、銅・鉛・亜鉛などのベースメタルや、リチウムイオン電池の材料などに使用されるコバルトなどのレアメタルを多く含んだ海底鉱物資源が点在します。今後、深海の磁気異常計測により、海底に眠るレアメタル資源の分布を把握することに活用することができると期待されます。
本研究を推進して、深海に眠るレアメタルの存在量と位置情報を把握し、正確な海底資源マップを作成することを目指します。
【洋上風力施設の点検】
カーボンニュートラルの達成に不可欠な洋上風力発電は、発電したエネルギーを水中ケーブルで送電します。送電ケーブルには強い磁界が発生し、従来の金属探知センサでは正確な測定が困難な環境となります。強い磁界環境でも安定した性能を発揮する「ジカイ」を小型化し、自律型海中ロボット(AUV: Autonomous Underwater Vehicle)に搭載し、効率的な洋上風力施設の点検を行うことを目指します。
この度のワールドスキャンと東大生研 ソーントン研究室との共同研究が、海洋資源分野での実用化に向けた大きな第一歩となることと期待しています。
そして、今後も先進的な技術を活用し、社会に貢献する研究を推進してまいります。
<株式会社ワールドスキャンプロジェクト概要>
代表者:CEO 上瀧 良平
設立:2020年1月22日
所在地:東京都新宿区西早稲田2-18-23 スカイエスタ西早稲田 2F
主な事業:ロボット、ドローン、Web3インフラ、汎用IoT端末、その他関連製品の研究開発・設計・製造・販売・輸出
共同研究:九州大学、名古屋大学、東京大学
URL:https://world-scan-project.com/
<東京大学 生産技術研究所 概要>
所長:年吉 洋
発足:1949年5月
所在地:東京都目黒区駒場4-6-1
東京大学 生産技術研究所は、国内最大規模の大学附置研究所で、約400 名の教職員、約900 名の大学院学生等、総勢1,300 名以上が、教育研究活動に従事しています。工学のほぼ全領域を包含する総合工学研究所また世界的中核研究所として、先端的な工学知の創造・発信と実践的な人材の育成を両輪とし、社会における様々な課題の解決や産業の創成に貢献し、数多くの分野融合かつ国際的な活動を組織的に展開しています。
URL:https://www.iis.u-tokyo.ac.jp/ja/
<用語解説>
(注1)「JIKAI(ジカイ)」
ワールドスキャンが開発した新型の金属探知センサです。従来の金属探知センサとは異なり、水中ドローン(ROV)のモーターが発するノイズや磁気を帯びた物体の影響を受けにくく、深海環境でも安定した性能を発揮します。
(注2)「3D画像マッピングシステム」(SeaXerocks3)
東大生研 ソーントン研究室が開発した海底の3次元画像マッピングを行う計測装置。カメラ、シート状のレーザおよびフラッシュの組み合わせにより構成され、AUVやROVに搭載して、ロボット側のナビゲーションセンサ情報により位置制御を行い、1.5〜10m程度の高度から海底面の高精度の3次元画像マップを作成することができます。ロボットにナビゲーションセンサが搭載されていない場合には、SeaXerocks3にセンサを直接つなげることが可能です。
【問い合わせ先】
株式会社ワールドスキャンプロジェクト
info(末尾に"@world-scan-project.com"をつけてください)
東京大学 生産技術研究所
准教授 ソーントン・ブレア
Tel:03-5452-6487
E-mail:
blair(末尾に"@iis.u-tokyo.ac.jp"をつけてください)
harumis(末尾に"@iis.u-tokyo.ac.jp"をつけてください)