東京大学 生産技術研究所(以下、東大生研)は、海洋エンジニアリング株式会社および株式会社ディープ・リッジ・テクの3者で構成される共同企業体として、国立研究開発法人水産研究・教育機構開発調査センター(以下、開発調査センター)から委託をうけた「道東太平洋沖における深海生物資源の分布状況を把握する調査」研究を開始します。
東大生研 ソーントン ブレア准教授の研究チームは、本調査で、これまで深海生物資源調査が十分におこなわれていなかった道東太平洋沖の水深800m~2000mの深海域の漁場について、3次元画像マッピング装置(注1)を搭載した自律型海中ロボット(AUV:Autonomous Underwater Vehicle)(注2)を用いた海底面の画像マッピング調査および試験採集を行い、同海域の深海生物資源の分布生態や現存量に関する情報を取得し、高効率の自動資源調査を行います。
AUVによる調査は、はじめに、航行型AUVにより高度8〜12mで海底面の広域マッピング(一枚の画像幅8〜12m)を行い(センチメートルオーダーの解像度)、取得したデータから深海生物の分布状況などを推定できる基礎情報を得ます。特徴的な生物分布を示すような場所を選び、次に、ホバリング型AUVにより高度1.5〜2mの詳細観測(一枚の画像幅1.5〜2m)を行い(ミリメートルオーダーの解像度)、深海生物の種類の判別や、個体の体長を推定できる詳細情報を得ます。並行して行われる試験採集データとの照合により、精度の高い生物情報を得ることを目指します。
本調査では、同じ海域で、異なる時期に調査を実施することで、時期による深海生物分布の傾向の違いについても調べます。本手法は、東大生研が長年培ってきた海底鉱物資源のAUVによるマルチレゾリューショナルな調査手法を深海生物資源調査に応用するものです。
本調査により、開発調査センターが目指す「水産業の健全な発展や今後も水産物の安定供給を図るため、様々な環境変化に柔軟に適応可能な新たな漁業生産体制を構築し、未利用低利用の漁場や魚種の積極的な活用をしていく」ことに貢献し、自律型海中ロボットを利用した先鋭的な調査が水産業の発展に寄与することが期待されます。
〇実施概要:
【調査期間(ただし、天候やその他の理由により変更の場合あり)】
1期:令和7年4月1日(火)~令和7年5月1日(木)
2期:令和7年6月1日(日)~令和7年7月9日(水)
3期:令和8年1月20日(火)~令和8年2月18日(水)
【調査船】
第一開洋丸(総トン数:1406トン):AUVによる探査、海底地形情報の収集を主に担当
第六開洋丸(総トン数:443トン):試験採集を主に担当
【調査に用いるAUV】
航行型AUV(注3)「AE200f」
ホバリング型AUV「Tuna-Sand2」
ホバリング型AUV「BOSS-A」
〇関連情報:
国立研究開発法人水産研究・教育機構
プレスリリース 道東太平洋沖における深海生物資源の分布調査を開始します(2025.03.26)
URL:https://www.fra.go.jp/home/kenkyushokai/press/pr2024/20250326_press.html
東京大学 生産技術研究所
【記者発表】世界初の大規模調査!3台のロボットが連携し、海底3次元画像を取得 ~コバルトリッチクラストの賦存状況の調査への貢献に期待~(2019.03.29)
URL: https://www.iis.u-tokyo.ac.jp/ja/news/3079/
〇参考資料:
調査に用いる AUV 仕様
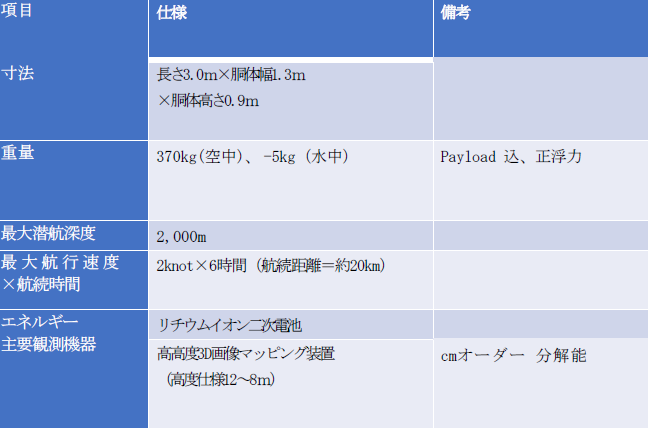
航行型 AUV AE2000f:広域調査:高高度 3 次元画像マッピングシステム
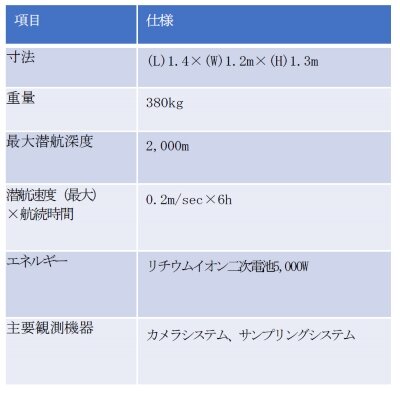
ホバリング型 AUV Tuna-Sand2:詳細調査:高解像度ステレオカメラシステム
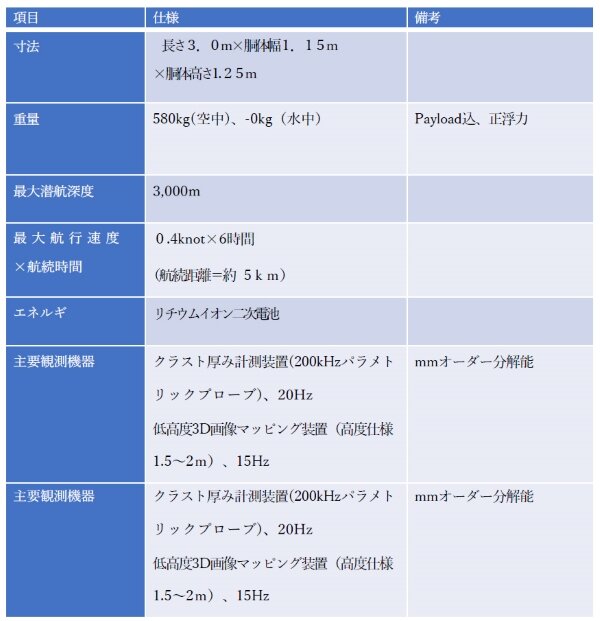
ホバリング型 AUV BOSS-A:詳細調査:低高度3 次元画像マッピングシステム
○発表者・研究者等情報:
東京大学 生産技術研究所
ソーントン ブレア 准教授
○用語解説:
(注1)3次元画像マッピング装置
海底の3次元画像マッピングを行う計測装置。カメラ、シート状のレーザおよびフラッシュの組み合わせにより構成され、AUVやROVに搭載して、ロボット側のナビゲーションセンサ情報により制御を行い、1.5〜10m程度の高度から海底面の高精度の3次元画像マップを作成することができる。ロボットにナビゲーションセンサが搭載されていいない場合には、別途つなげることが可能である。
(注2)自律型海中ロボット(AUV:Autonomous Underwater Vehicle)
動力源を持ち、プロペラなどを用いてあらかじめ決められたルートに沿って無索で全自動で海中を観測する装置。
(注3)航行型AUV・ホバリング型
AUV航行型AUVは広範囲を高速で航行することをミッションとするが、ホバリング型AUVは、運動自由度が高く、定点保持・その場回頭、その場での上下運動が可能なAUV。対象を詳細観測することを主要ミッションとする。
○問い合わせ先:
東京大学 生産技術研究所 ソーントン研究室
特任研究員 杉松 治美(すぎまつ はるみ)
Tel:03-5452-6487
E-mail:harumis(末尾に"@iis.u-tokyo.ac.jp"をつけてください)