○発表者:
横田 裕輔(東京大学 生産技術研究所 海中観測実装工学研究センター 講師)
株式会社プロドローン(愛知県名古屋市、代表取締役社長 河野 雅一)
○発表のポイント:
◆船舶やブイによる観測で不足する高いリアルタイム性や機動性を実現した2つの海洋観測用ドローンを開発し、実海域での実験で十分な観測能力があることを示しました。
◆1つ目は、海洋観測機器の自動投下・データ収録機能を搭載し、荒天の時間帯もあった中、同一地点を繰り返し観測できることを確認しました。2つ目は、海面着水機能を付すことで海面において精密衛星測位の機能が実現され、海面保持性能と十分な位置データや動揺データを記録が可能であること、また機動的ブイ観測が可能であることが示されました。
◆海洋情報のリアルタイム取得・海洋観測の安価化が可能です。今後、機体性能や動力源などの研究・開発により、資源探査や測地・測量などのより広い利用用途を実現する海洋観測ドローンの実現が期待されます。
○発表概要:
東京大学 生産技術研究所 海中観測実装工学研究センターの横田 裕輔 講師と株式会社プロドローンは、海中観測・海底観測の効率化・高速化を目指して2つの新しい観測用ドローンを開発しました。
海洋場や海底地形の把握、海底の位置決定は、海洋学・地震学・水産、資源探査などの多くの学術・産業において欠かせないものですが、海中・海底を観測する手段は船舶やブイをプラットフォームとする場合が多く、リアルタイム性や機動性の不足が共通の課題として挙げられます。一方で、機体・燃料コストが低く人的・時間コストが非常に低いドローンの利用が陸域では急速に進展していますが、海洋観測プラットフォームとしての活用は実例や機体の動作・計測データが圧倒的に不足しているのが現状です。
本研究グループは、40km/h以上で海面付近を高精度に位置制御しながら自動で往復できるドローンを活用することで、高いリアルタイム性や機動性を実現した海中・海底観測装置を試験的に開発し、静岡県焼津市沖において実験を行いました。1つ目のドローンは、陸域運用で培われた定点保持・自動航行機能を応用して海洋観測機器の自動投下・データ収録機能を搭載しました。5m/s以上の風と雨が降りしきる荒天の時間帯もあった中、15分おきに予定通りの同一地点を繰り返し観測できることを確認しました。この観測技術は、海洋把握の高速化・簡便化、複数点の同時把握、kmスケールの海洋構造把握、海洋音響工学の精度向上に利用可能です。2つ目のドローンは、ドローンに海面着水という特異な機能を付すことで、海面において高精度GNSS(注1)による精密衛星測位の機能が実現されています。悪天候下での観測に求められる海面保持性能と十分な位置データや動揺データを記録できることを確認し、海底地形調査・地殻変動調査などへの応用可能性を拓きました。また、機動的ブイ観測が可能であることも同時に示され、海洋環境の準リアルタイム計測実現のために利用可能です。
今後のさらなる研究・開発によって、より広い利用用途を実現する海洋観測ドローンの実現を目指します。
○発表内容:
<研究の背景>
近年の計算機科学の発展によって、リアルタイムに防災情報や環境情報を取得し気象予報のように数値予測する技術が高度化されました。しかし、海域に関しては、現状は多量のデータをリアルタイム・連続に取得することは困難です。この問題のボトルネックは海洋プラットフォームにあります。
多くの海洋観測は昔も今も船舶で行われます。船舶は多くの機材を積むことができ、人が現場で作業する上でも欠かすことのできない海洋プラットフォームです。しかし、海面を移動することで時間・燃料コストがかかり、多くの人的コストや維持コストもかかります。簡易的・少人数で海洋を調査し、即時的に海域情報を取得するためには、船舶だけではない新しい海洋観測の「目」が必要なのです。
一方で、機体・燃料コストが低く人的・時間コストが非常に低い自律型航空機・ドローンの利用が陸域では物流・測量などの多様な分野で急速に進展しています。しかし、民間等でのドローンの利用が始まって5年以上が経過した現在においても、海洋観測プラットフォームとしての活用は実例や機体の動作・計測データが圧倒的に不足しているのが現状です。
<研究の内容>
上記のような、海洋情報の取得に関する機動性やリアルタイム性の高度化を目指す東京大学 生産技術研究所 海中観測実装工学研究センターの横田 裕輔 講師の研究目的と株式会社プロドローンのドローンの海洋応用・展開への目的が合致し、ドローンによる海域観測の実証に関する共同研究を実施しました。その中で、通常、船舶で実施する観測の機動性・リアルタイム性の低さを根本的に改善するためにドローンへの観測機器の搭載を検討し、以下の2種類の機体を改良・開発しました。(1)のドローンは、陸域運用で培われた定点保持・自動航行機能を応用し、海洋観測機器の自動投下・データ収録機能を搭載しました(図1)。(2)のドローンは、海面着水という特異な機能を付すことで、海面における精密衛星測位の機能を実現しました(図2)。これらの機体を、静岡県焼津市の石津浜公園沖にてフィールド実験で検証しました(図3)。
(1)海中観測機器投下型ドローン
海洋場を計測するための機器(可搬式XCTD(注2)投下装置MK-150P:(株)鶴見精機製)を搭載したドローン(ベース:PD6B-TYPEⅡ)を開発しました。自動で観測地点まで40km/h以上で往復することができ、XCTDの自動投下機構により、陸上の観測者が好きな時にタブレットやリモコンから観測スイッチを押すことができるように設計されています。
実験では、XBT(注3)観測試験も同時に実施し、いずれの観測データも良好に取得されることを確認しました。1回の観測は約15分ごとに実施されました。当日の気象条件は5m/s以上の風と雨が降りしきる荒天の時間帯もありましたが(動画は好天の時間帯に撮影)、予定通りの同一地点の繰り返し観測が実施されました(一部のデータについて、図4に示しています)。この観測技術は、港湾・養殖場等における海洋把握の高速化・簡便化を可能とするだけでなく、海上の船舶から利用することで遠洋域でも同時に複数点の海洋場を把握できるようになります。また、kmスケールの海洋構造把握、海洋音響工学の精度向上に利用可能です。
(2)高精度GNSS搭載・海面着水型ドローン
2周波GNSS受信機・アンテナ(協力:(株)イネーブラー)を搭載し、精密衛星測位による位置決定を可能とした海面着水型ドローン(ベース:PD4-AW-AQ)を開発しました。実際の海面では高い波浪・風浪にさらされるため、着水・離水を高い水準でコントロールする必要があります。また、そのような悪環境下で海底観測を行うためには、精密な位置データと機体動揺データを取得する必要があります。このドローンは、高精度に位置決定をしながら漂流観測ブイとして海面を保持し、離着水によって機動的に移動することができます。(1)と同様に自動で航行・動作を指示することも可能です。
実験では、悪天候下での観測試験、高精度GNSSデータ・機体動揺データの検証を行い、海面・海中・海底観測に求められる海面保持性能とデータを取得できることを確認しました(一部のデータについて、図5に示しています)。本実験により、精密音響機器の搭載に耐えうるプラットフォーム側の精密位置決定が可能であることが示され、海底地形調査・地殻変動調査などへの応用可能性を拓きました。また、機動的ブイ観測が可能であることも同時に示され、沿岸波浪、沿岸海水採取、海洋プラスチックごみの簡便な把握などの海洋環境の準リアルタイム計測の実現に利用できます。特に、ブイとしての能力は、投入・揚収が極めて簡易に行える点で非常に有用です。ただし、遠洋での利用のためには、飛行時間の短さ、耐波性能に課題を残しており、その点で今後のさらなる研究・開発が必要です。
<今後の展開>
本研究・実験によって、ドローンによる海洋観測プラットフォームは機体・燃料費のコスト、人工・時間のコストがほとんどのケースにおいて船舶よりは遥かに小さくなり、少なくとも航行範囲内では船舶の倍以上の速度で移動可能であることから、即時性や機動性も格段に高いことが示されました。
(1)のドローンについては、既に実運用可能なレベルに到達しており、用途に応じた観測が可能です。たとえば、ある地点の海洋環境を継続的に監視する必要があるケースや事前確認を行いたいケースでは時間・金銭コストの面で高い価値があります。今後は、社会実装に向けて機能面、運用面での検討を進めていきます。
(2)のドローンについては、自由に位置を設定し、離脱できる高度化された新しいブイとして高い能力を持つことが示されました。観測者にとって、それぞれに必要な音響機器や海面観測機器を搭載すれば多様な利活用が可能です。飛行時間や耐波性能の課題を解決していくことで海底測地・測量や遠洋での通信ネットワークの拡張など、広範な応用を検討できるようになると考えられます。今後、機体性能や動力源などの研究・開発について検討していきます。
○問い合わせ先:
(本研究に関して)
東京大学 生産技術研究所 海中観測実装工学研究センター
講師 横田 裕輔(よこた ゆうすけ)
E-mail:yyokota(末尾に"@iis.u-tokyo.ac.jp"をつけてください)
(ドローンに関して)
株式会社プロドローン 営業部
児島 志侑
E-mail:info-jp(末尾に"@prodrone.com"をつけてください)
○用語解説:
(注1)GNSS:「GPS」や「みちびき」などの衛星を利用した測位観測システム
(注2)XCTD:海中電気伝導度・水温・水圧計測機器
(注3)XBT:海中水温計測機器
○添付資料: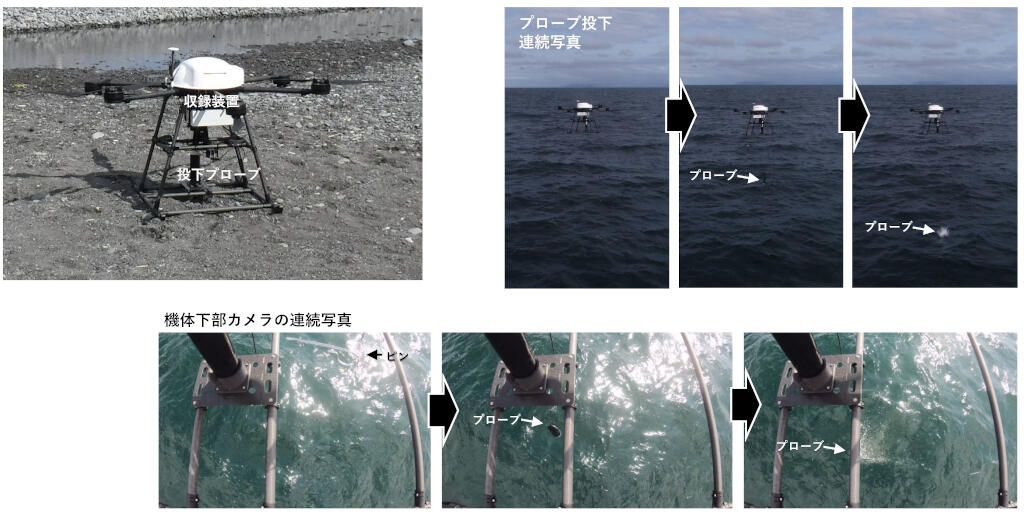
図1:海中観測機器投下型ドローンのXCTD投下の様子。
動画1a:海中観測機器投下型ドローンのXCTD投下の様子。
動画1b:海中観測機器投下型ドローンのXCTD投下の様子(機体下部カメラ)。
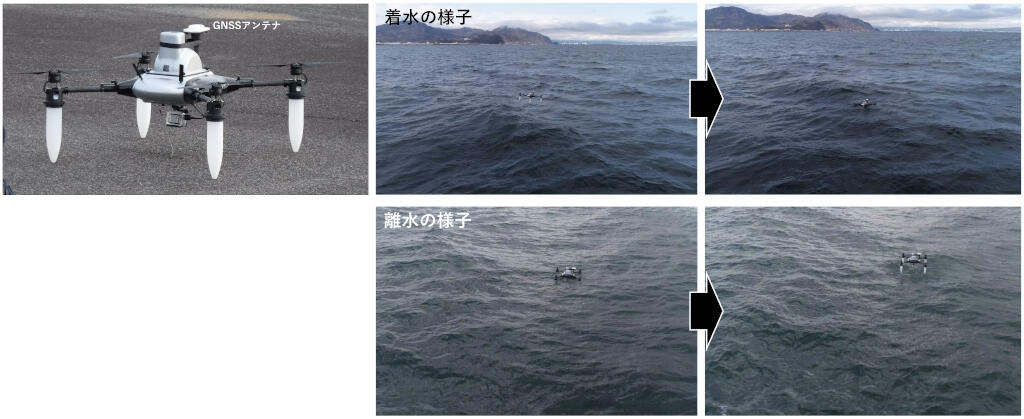
図2:高精度GNSS搭載・海面着水型ドローンの着水、漂流、離水の様子。
動画2a:高精度GNSS搭載・海面着水型ドローンの着水、漂流様子。
動画2b:高精度GNSS搭載・海面着水型ドローンの離水の様子。
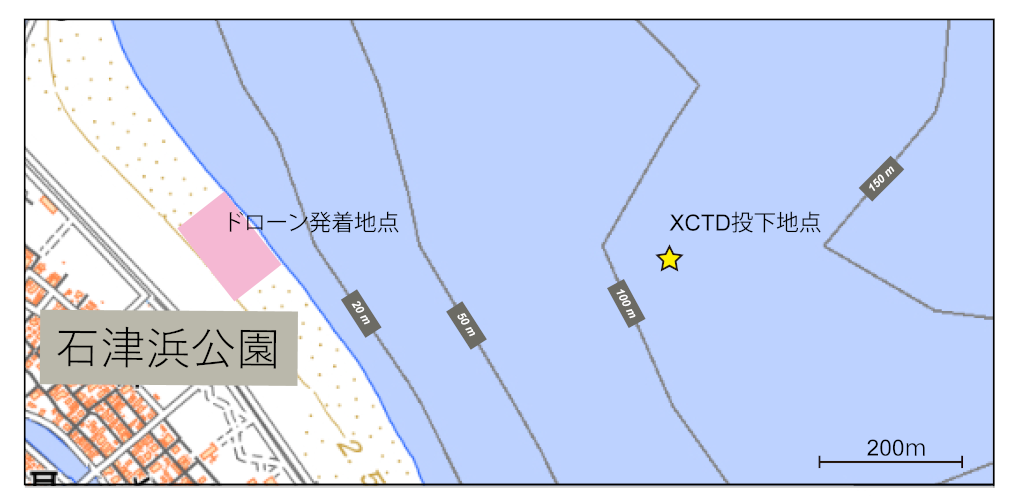
図3:フィールド実験を実施した石津浜公園。(国土地理院地図・海しる(海上保安庁)https://www.msil.go.jpより)
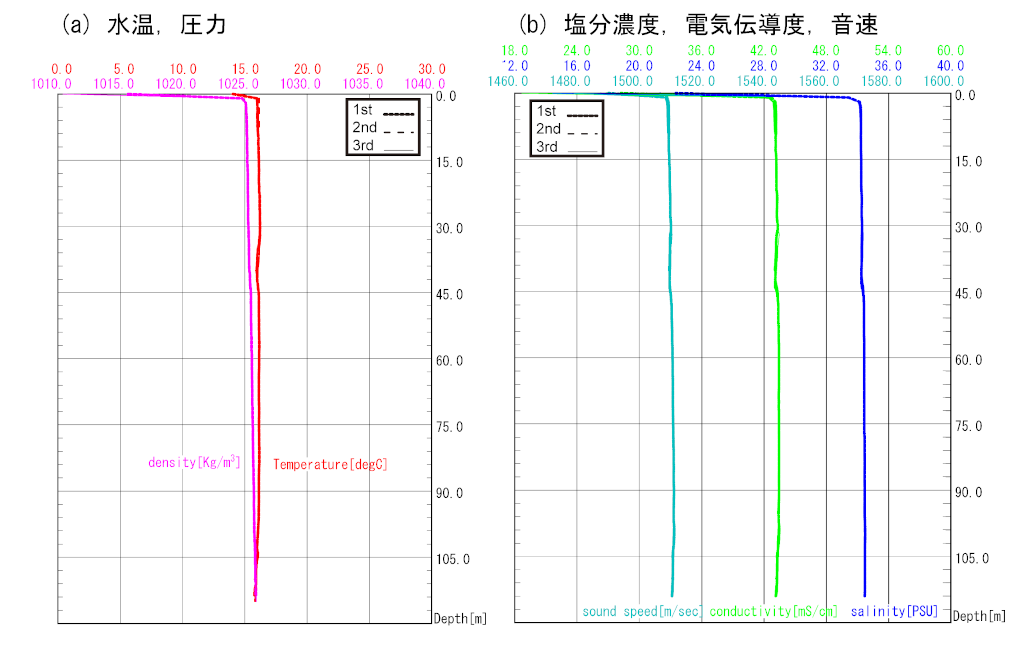
図4:(1)の試験において図3中の同一地点を約15分おきに計測したXCTDデータ。同一地点を観測できていたことを示している。
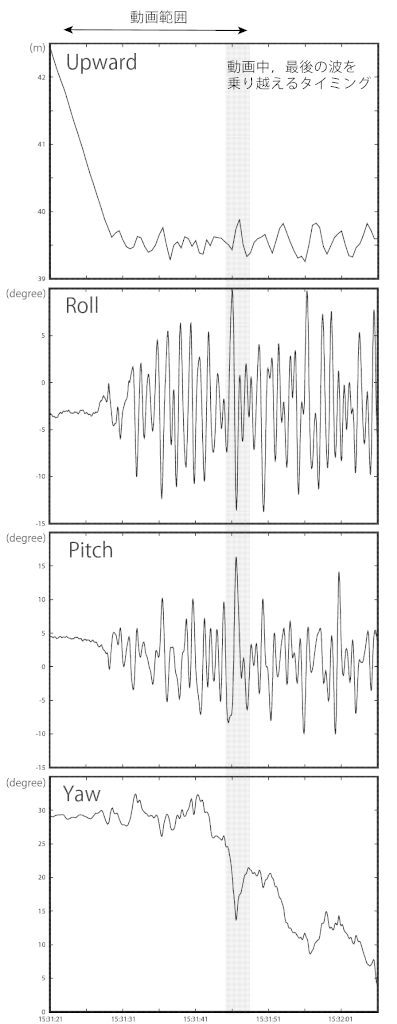
図5:(2)の試験における着水時のGNSSの上下動(2Hz)、IMUの動揺データ(20Hz)。プラットフォーム側の精密位置情報を示す。