【記者発表】海中ロボットによる海氷裏面の全自動計測に成功~ 南極海での調査に向けて大きな一歩 ~
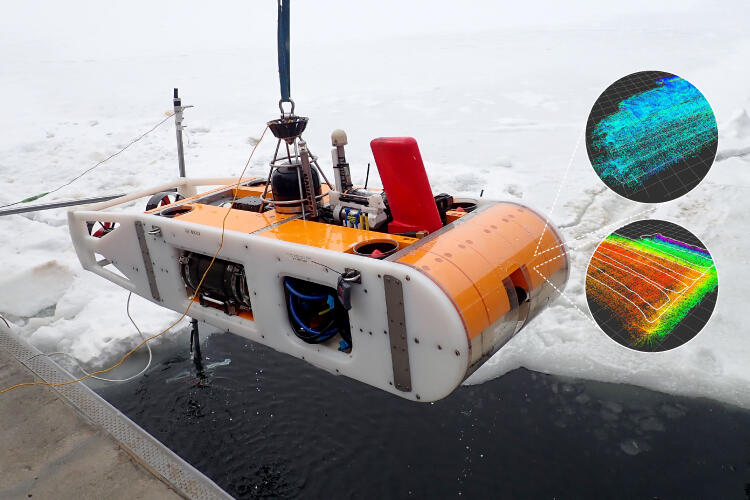
#東大生研 の巻 俊宏 准教授らの研究グループは、海氷や棚氷の下に入り込み、全自動で航行しながら氷の裏面の形状を高精度に計測する自律型海中ロボット「MONACA」(モナカ)を開発しました。今後は更なる性能向上を図り、来年度以降に予定されている南極海への展開に備えます。南極での計測を通し、地球システムにおける南極の役割の解明を目指します。
