【記者会見】自律型海中ロボット「Tuna-Sand2」全自動生物サンプリングに成功
最新の研究
最新の研究
自律型海中ロボット「Tuna-Sand2」全自動生物サンプリングに成功
自律型海中ロボット「Tuna-Sand2」全自動生物サンプリングに成功
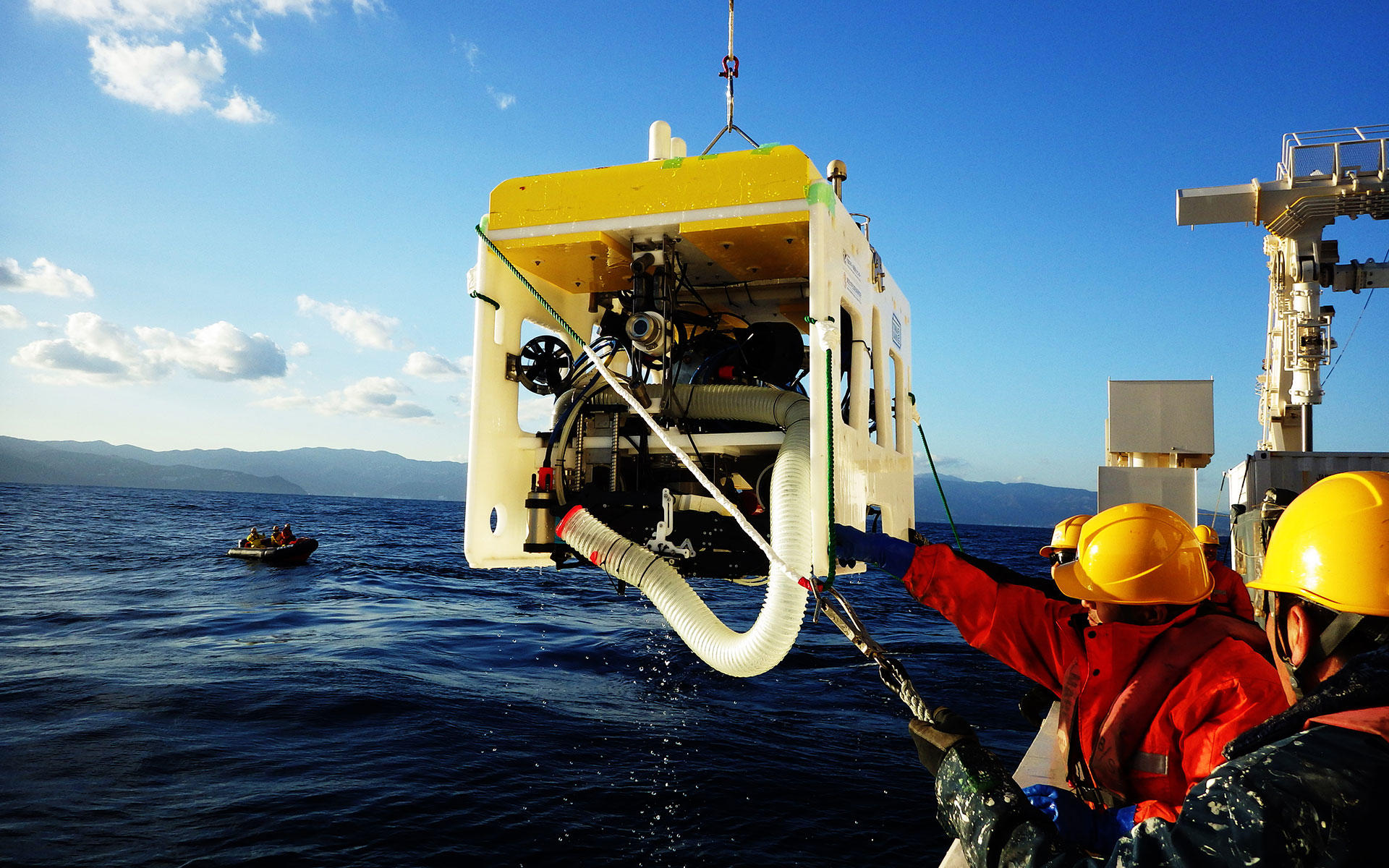
通信環境が悪い深海などでは、自律型海中ロボット(AUV)を使って、海底の生物や鉱物などの採取(サンプリング)ができないことが、長年の課題でした。今回、東京大学 生産技術研究所 海中観測実装工学研究センター、九州工業大学大学院 生命体工学研究科/社会ロボット具現化センターを中心とする研究グループは、サンプリングを得意とするAUV「Tuna-Sand2」を開発し、清水沖の自然環境下で全自動生物サンプリングに成功しました。資源調査や科学調査で、画像や音響データに加え、実物のサンプルを得ることができ、効率的かつ高精度で資源の賦存量を調査できると期待されます。
関連記事