○発表者:
横田 裕輔(東京大学 生産技術研究所 准教授)
平川 嘉昭(横浜国立大学 准教授)
金田 政太(株式会社スペースエンターテインメントラボラトリー 代表取締役)
○発表のポイント:
◆世界で初めて、海面に着水したUAVと深海底との音響通信および測距に成功した。
◆船に比べて圧倒的な機動性を持つ飛行艇型UAVによる海底観測を実現したことで、高速・高効率・リアルタイムの海底情報の取得が可能となった。
◆深海底情報の取得速度のボトルネックを解消し、有人観測の難しい海底火山域の高頻度計測、深海用ロボットの低コスト展開、高速な広範囲の海底測地・地形観測など、海底観測の高頻度化・低コスト化により、海洋観測工学分野に革命を起こすことが期待される。
○発表概要:
海底測量・海底調査などの深海底観測には、船やブイに取り付けられた観測装置が用いられる。しかし、船やブイには、コストが高く、海面上の一定の場所に留まり続ける能力が低いなどの課題があり、観測頻度を高めることが難しいというボトルネックがある。
東京大学 生産技術研究所の横田 裕輔 准教授、横浜国立大学の平川 嘉昭 准教授、株式会社スペースエンターテインメントラボラトリーは共同で、UAV(Unmanned Aerial Vehicle、注1)搭載用の海底通信装置を開発し、着水したUAVに対して海底観測のための制御を可能とすることで、世界で初めて海面に着水したUAVと1,000m以深の深海底との音響通信および測距に成功した。船に比べて圧倒的な機動性を持つ飛行艇型UAVによる海底観測を実現したことで、高速・高効率・リアルタイムの海底情報の取得が可能となった。この技術によって、深海底情報の取得速度のボトルネックが解消されるものと期待される。一例として、将来的に、海底観測の高頻度化・低コスト化を可能とするなど、様々な海洋観測工学分野に革命を起こしうる結果である。
○発表内容:
地震学や地質学における海洋音響通信による海底の地形や位置の把握、生物学・海洋学・火山学における海水サンプルの取得、深海洋ロボットの投入と回収など、観測装置を用いた海洋・海底計測には、船舶やブイが用いられる。しかし、船舶にはコスト(大型船舶の場合、100万円/日以上の燃料・人工費がかかる)や機動性(一般的な船舶の場合、20km/h程度)の点に課題があること、ブイには海面位置の保持能力に限界があることが、多くの海洋・海底計測の頻度向上においてボトルネックとなっている。例えば、地震防災上、海底のセンチメートル精度の移動速度を高頻度で観測する必要性がある点や、いまだに世界中の海底地形の詳細が正確に計測しきれていない現状において、観測頻度の低さは重大な課題である。
東京大学 生産技術研究所の横田 裕輔 准教授、横浜国立大学の平川 嘉昭 准教授、株式会社スペースエンターテインメントラボラトリーは共同で、海面に着水したUAVによる海底観測のための開発研究を実施した。まずは、UAV搭載用の海底通信装置の小型化および軽量化を図ることでUAVによる深海底通信を可能とした。次いで、自律制御による海面離着水が可能なUAVに対し、海底観測のための海面制御を可能とした。これにより、相模湾において、水深約1,300mの海底に設置された海底音響基準局(注2)との通信および測距を実現し、深海底の測距観測に成功した。以上の結果から、世界で初めて海面に着水したUAVと深海底との音響通信・測距に成功したものである。
本実験で用いられたUAV(図1)は株式会社スペースエンターテインメントラボラトリーにより新たに開発された飛行艇型UAV HAMADORI6000試作モデルであり、翼幅6m、巡行飛行速度110km/hである。30m程度の離水距離を実現するため、ある程度開けた海洋上であれば自在に離着水することができる。製品モデルとして、最大8時間、400海里の飛行が可能となることを目指し、開発を進めている。これにより観測点までの移動、運用を簡便なものにしている。今回の実験で搭載された観測機器(ペイロード)の総重量は6kgであり、一般的な海底観測装置に比して、大幅に軽量化されたものである。
深海底との長距離を音響で通信するには、安定した環境において音響信号を発信しなければならない。UAVに装着されている音響装置は海中の浅い部分にあるため、機体の動揺や波浪による泡の影響で音響通信が不安定になることがある。実験期間の相模湾は、最大風速約8m、最高波高約1.5mの環境であったが、機体の速度や姿勢をコントロールすることで海面航走を安定させ、音響通信を安定して実施することに成功した(図2)。本観測では、水深1,300mとの通信を実施したが、この機体によって、水深5,000m程度までの深海底との通信や観測が可能となる見通しであり、日本周辺の非常に広い範囲の海洋底を観測対象とすることが可能となることが期待される。
船に比べて圧倒的な機動性を持つ飛行艇型UAVによる海底観測を実現したことで、高速・高効率・リアルタイムの海底情報の取得が可能となった。この技術によって、海洋・海底情報の取得速度というボトルネックが解消されると期待される。例えば、海底調査の高頻度化および低コスト化を可能とすることで、さまざまな微細な海底事象の検出が可能となることが期待される。具体的には、有人観測の難しい海底火山域の高頻度計測、深海洋ロボットの低コスト展開、高速な広範囲の海底地形観測など、様々な海洋観測工学分野に革命を起こしうる結果である。社会的にも海洋情報の取得速度・流通速度の認識を大きく変えうる結果である。今後は、実運用に向けた安全性の検証、運用能力の確立、自律航行や自律観測技術のさらなる安定化を目指した開発とともに、実際の観測運用フェーズに進んでいく予定である。
謝辞:本実験では、海上保安庁が運用する海底地殻変動観測網(SGO-A、注3)の相模湾(SAGA)観測点の海底音響基準局を使用しました。本研究は公益財団法人セコム科学技術振興財団の助成を受けました。
○問い合わせ先:
東京大学 生産技術研究所
准教授 横田 裕輔(よこた ゆうすけ)
Tel:03-5452-6188
E-mail:yyokota(末尾に"@iis.u-tokyo.ac.jp"をつけてください)
URL:https://sgoi.iis.u-tokyo.ac.jp/
株式会社スペースエンターテインメントラボラトリー
代表取締役 金田 政太(かねだ まさた)
Tel:0244-26-6208
E-mail:masata.kaneda(末尾に"@selab.jp"をつけてください)
URL:http://www.selab.jp/
○用語解説:
(注1)UAV
Unmanned Aerial Vehicle の略。無人航空機を指す。大別してヘリコプタータイプと飛行機型があり、本プレスリリースでは、飛行機型のうち海面離着水する飛行艇型を用いた。
(注2)海底音響基準局
受信した音響信号をそのままの形で返信する海底機器(ミラートランスポンダ)。
(注3)海底地殻変動観測網(SGO-A)
Seafloor Geodetic Observation-Arrayの略。海上保安庁が海底地殻変動を観測するために日本海溝や南海トラフ沿いに設置している観測網を指す。
○添付資料: 
図1 海面で観測行動を取るUAVの写真
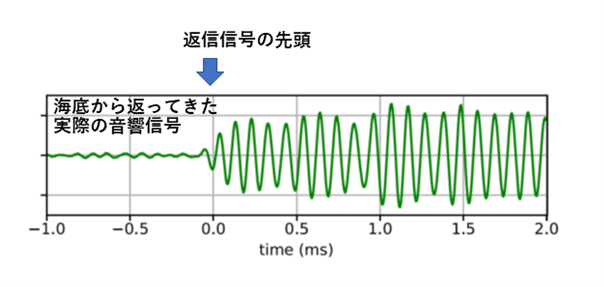
図2 海底から返ってきた音響信号
海底と通信した結果、返信されてきた音響信号データを無線通信で取得した。
動画1 海面で観測行動を取るUAV https://www.youtube.com/watch?v=c5Nso5R05Fs
事前に計画された海面上の測線をUAVが航行しながら、深海底に設置された基準局との音響通信を行っている様子。