○発表者
竹内 昌治(東京大学 生産技術研究所 教授
統合バイオメディカルシステム国際研究センター 教授)
森本 雄矢(東京大学 生産技術研究所
統合バイオメディカルシステム国際研究センター 助教)
○発表のポイント
◆樹脂製の骨格の上に、向かい合わせに2つの骨格筋組織を培養することで、拮抗した筋構造を持つバイオハイブリッドロボットの構築に成功しました。
◆拮抗筋構造をとることで、関節の動く範囲が広がるうえに、1週間以上動かし続けられることが明らかになりました。
◆運動時の骨格筋の特性の解明や、運動に関連する病気の治療薬の探査への応用が期待されます。
○発表概要
東京大学 生産技術研究所の竹内 昌治 教授、森本 雄矢 助教らは、骨格筋細胞を樹脂製の骨格上に3次元培養(注1)することで、2つの骨格筋組織が向かい合わせに配置された指型のバイオハイブリッドロボットを構築することに成功しました。
このバイオハイブリッドロボットに電気刺激を与えると片方の筋肉が収縮し、その結果もう片方の筋肉が伸展することで、関節が大きく回転します。この関節の回転によって、リングを持ち上げ、運び、所定の位置に置く、という一連の動作を行うことに成功しました。
本技術により、生体における拮抗した骨格筋(注2)の伸展・収縮を再現でき、運動時の骨格筋の生理学的現象の解明や、運動に関連する病気の治療薬の探査が促進されると期待されます。
本成果は、米科学雑誌「Science Robotics」のオンライン版で2018年5月30日午後2時(米国東部標準時(EST))に公開されました。
○発表内容
<研究の背景>
3次元培養技術によって構築された骨格筋組織は、再生医療や動物を使わない薬剤試験モデルへの応用のみならず、生物のように効率のよい柔らかい運動を再現したロボットへの応用が期待されています。特に、生体組織と機械を融合させたロボットをバイオハイブリッドロボットと呼んでいます。これまでの研究では、拮抗筋構造ではなく単一の骨格筋組織を搭載するのが主流でした。この骨格筋組織は電気刺激によって収縮させることは可能でしたが、時間経過と共に筋肉が縮まり続け硬直し、短時間で収縮ができなくなってしまうという問題が起きていました。そのため、大きな駆動と長期間の駆動を両立可能なバイオハイブリッドロボットの実現が求められていました。
<研究の内容>
本研究グループは、同等の収縮能を持つ2つの骨格筋組織を向かい合わせるように関節を有する骨格上に配置することで、拮抗筋構造を作製しました(図1)。これにより、常に一方の骨格筋組織がもう一方から引っ張られるため、単一組織の培養時に起こる硬直が起きなくなり、単一組織では3日後にはほぼ動かなくなるのに対して、7日間という長期間、収縮性能を維持できるようになりました。さらに、各骨格筋組織をそれぞれ独立して電気刺激によって収縮させることで、肘の曲げと伸びのように骨格筋組織の伸縮を利用した大きな関節の駆動を実現することに成功しました(図2)。この関節の大きな駆動を活かして、関節の先に設置した腕にリングを引っ掛けて持ち上げる・持ち上げた状態で所定の位置までリングを運ぶ・リングを所定の位置に置く、といった一連の動作を行うことにも成功しました(図3)。
<研究の意義と展望>
この技術は、拮抗筋の力学特性や制御メカニズムを探る運動モデルや、拮抗筋構造下での骨格筋組織の薬物試験モデルとしての展開を考えています。また既に本研究グループでは、骨格筋組織と運動神経を接合することで神経刺激による骨格筋組織の収縮にも成功しており(Morimoto et al., Biomaterials, 2013)、神経刺激によって駆動するバイオハイブリッドロボットとしての発展も期待されます。
○発表雑誌
雑誌名:「Science Robotics」(オンライン版:日本時間5月31日(木)午前3時(米国東部時間:30日(水)午後2時))
論文タイトル: Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues
著者: Yuya Morimoto, Hiroaki Onoe, and Shoji Takeuchi
DOI番号: 10.1126/scirobotics.aat4440
○問い合わせ先
東京大学 生産技術研究所
教授 竹内 昌治(たけうち しょうじ)
Tel:03-5452-6650 Fax:03-5452-6649
研究室URL:http://www.hybrid.iis.u-tokyo.ac.jp/
用語解説
(注1)3次元培養
細胞を凝集させ、厚みを有する組織を構築する培養方法。
(注2)拮抗筋
上腕二頭筋と上腕三頭筋のように、互いに力が釣り合った筋肉。
資料
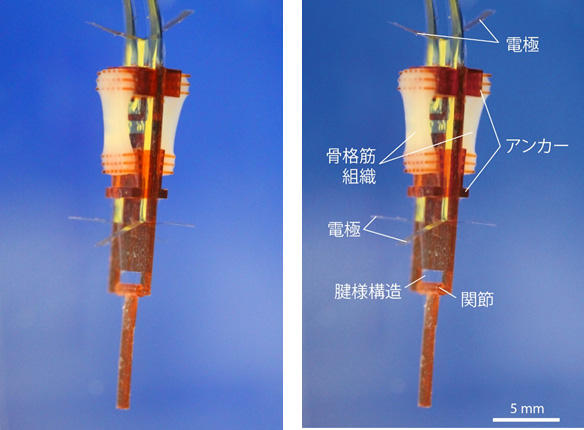
図1 作製した拮抗筋構造を有するバイオハイブリッドロボットの外観
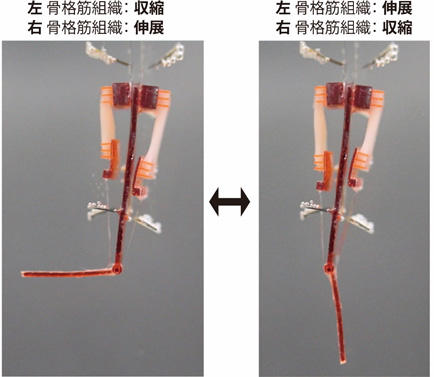
図2 2つの骨格筋組織がそれぞれ収縮・伸展することによる関節の駆動の様子
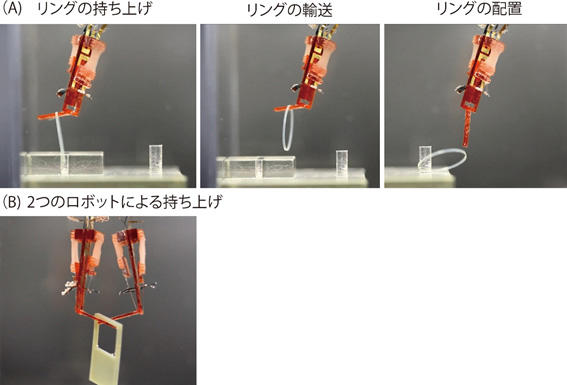
図3 (A)バイオハイブリッドロボットの関節駆動によってリングを持ち上げ、運び、所定の位置に置いている様子。(B)2つバイオハイブリッドロボットを同時に動かし、四角いフレームを持ち上げている様子