東京大学 情報学環/生産技術研究所[情報・システム部門] 鈴木高宏研究室
メカトロニック人工食道 |
|
超柔軟系の応用研究の一つとして,また医療・バイオ分野におけるロボット・メカトロシステム研究の一つとして,メカトロニック人工食道の開発を行っている.これは,食道癌手術における代替として置換するものであり,食道の機能が基本的に咀嚼物を胃へ送るという機械的作用に限定され,かつ心臓,肺,胃などの重要臓器に囲まれているため高い柔軟性を持つ必要があることなどから研究を行っている.
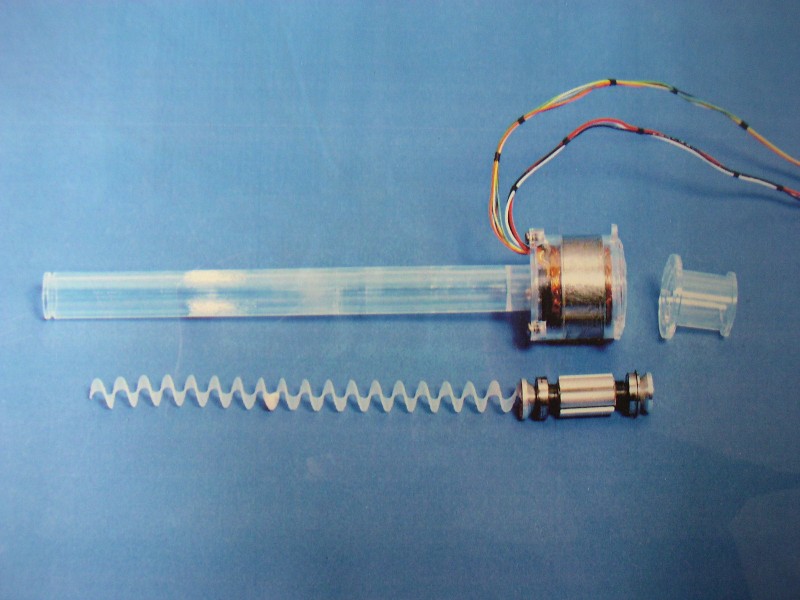
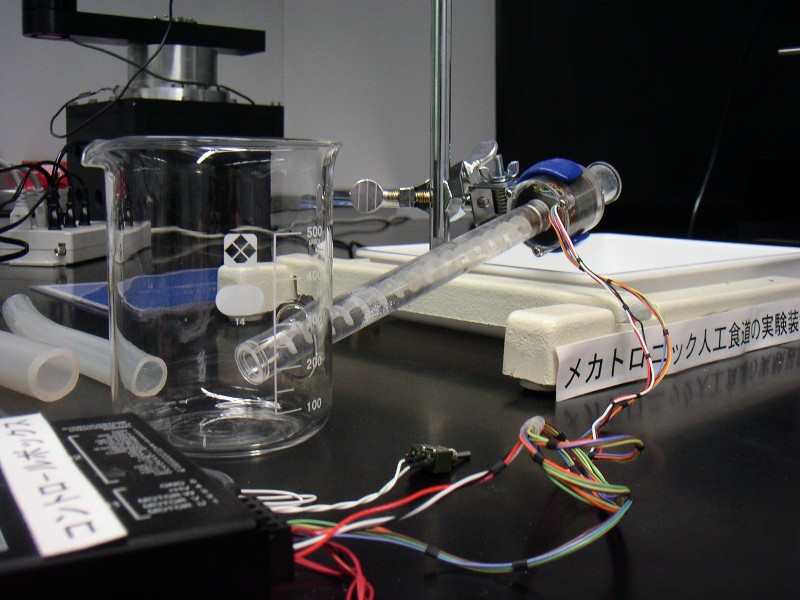
現在,食道の蠕動による咀嚼物の搬送機能を代替する機構について図のような試作実験機を開発し,例えば様々な粘性・粘着性を持つ対象の搬送能力を確認するなど,実験を行っている.今後は,機構制御や機構の運動解析や制御,またより実用化に向けての次期試作機の開発などを行っていく予定である.
| 超柔軟ロボットシステム | メカトロニック人工食道 | 人間-自動車-交通流系の動的挙動 |
Copyright(c): SUZUKI Takahiro Lab., I I I / I I S, The University of Tokyo