
東京大学 情報学環/生産技術研究所 [機械・生体系部門] 鈴木高宏研究室
超柔軟ロボットシステム |
|
|
|
|
「柔軟な」機械システムに関する研究は,これまでにも数多く行われてきた.
しかし,従来の研究では,柔軟性を有するモデルは特に「弾性」を有し,
常に元の形状に戻ろうとする「ポテンシャル力」が働くことが前提となっていた.
そのため,そのポテンシャル力による振動の抑制などの制御に関する研究が考えられてきたのだが,
一方で,「柔軟」だが「弾性」は有しない,つまり元の形状に戻ろうというポテンシャル力が働かない,
いわば「より柔軟な」モデルも考えられる.
これは,一次元形状なら糸やひも,二次元形状なら布や紙,といった現実に「より柔軟な」要素のモデルと考えられる.
本研究では,これを「超柔軟系」と呼んでいる.
こうした超柔軟要素は,構造を支える「硬さ」が無い分,その高い柔軟性と同時に非常に軽量であることがその大きな特長の一つである.
こうした要素を有した機械システムを考えた場合,当然その制御が困難である一方で,
その軽量性・柔軟性により人間など「柔らかい」生体に接触した際の危険性が非常に低いという大きな利点がある.
また,軽量であることから,同程度の重量に対して非常に長大なシステムを構成することが可能である.
一方,弾性に依拠しないモデルに関する研究もこれまでにないわけではないが,
それらは幾何的な形状の変化や,運動学的,ないし静力学的なレベルでの解析や制御にとどまっており,
動力学的な性質の解析や制御にまで踏み込んだものは皆無と言ってよい.
本研究では,まず超柔軟系の離散モデルとして,粘性は有しても良いが弾性は有しない,
受動関節で連結されたリンク系を考えることを提案している.
それにより,従来の多関節ロボットマニピュレータにおいて蓄積された知見や,
また特に当研究室で蓄積された自由関節マニピュレータに関する研究成果を応用することができる.
さらに,超多自由度マニピュレータに関した研究成果から連続的な動力学モデルの構築も共同研究により行なっている.
この超柔軟系について,特にシリアルにリンクが連結された1次元形状のものは,
各所で折れ曲がることはできるが,伸縮はしない,ひもや糸のような非伸縮な超柔軟系のモデルと考えてよい.
このような超柔軟要素を用いたロボットマニピュレーションを考えたとき,
従来のrigidなロボットマニピュレータにおけるものとは異なるが,
釣り糸や投げ縄,鞭などのように,非常に遠くの対象を捕獲・回収・移動したり,
撃力により力を与えたりといったタスクであれば実現可能と考えられ,
こうした柔軟性を積極的に利用した制御方法を確立することが本研究の目的である.
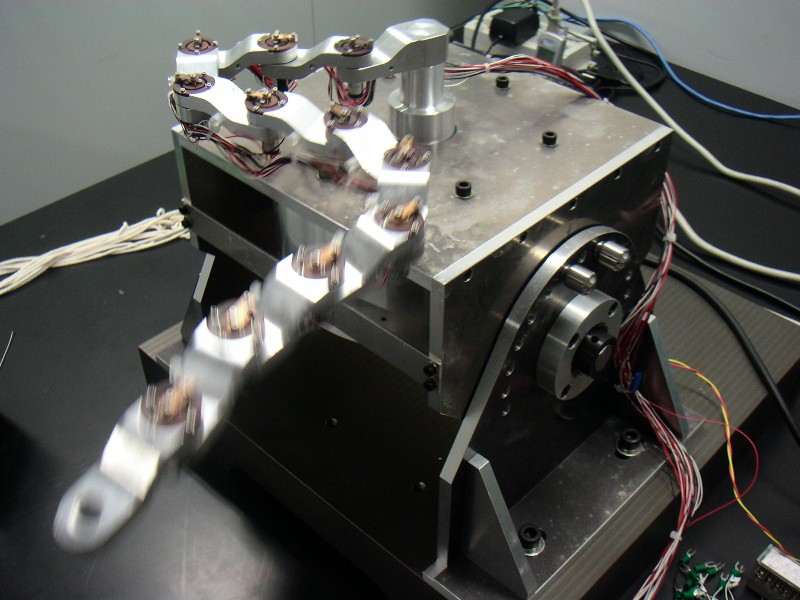
このようなロボットシステムを「超柔軟マニピュレータ」と呼び,特にその動力学的挙動に着目し,
その性質を積極的に利用した制御方法について研究を行っている.
図は,その制御方法の検証のために製作した,離散モデルに基づく超柔軟マニピュレータ実験装置である.
・ 超柔軟キャスティングマニピュレータ (概要:PDF1・PDF2)
・ 投射巻付きマニピュレーション (概要:PDF)
・ 超柔軟系の計測システム (概要:PDF)
・ 超柔軟3Dディスプレイ (概要:PDF)
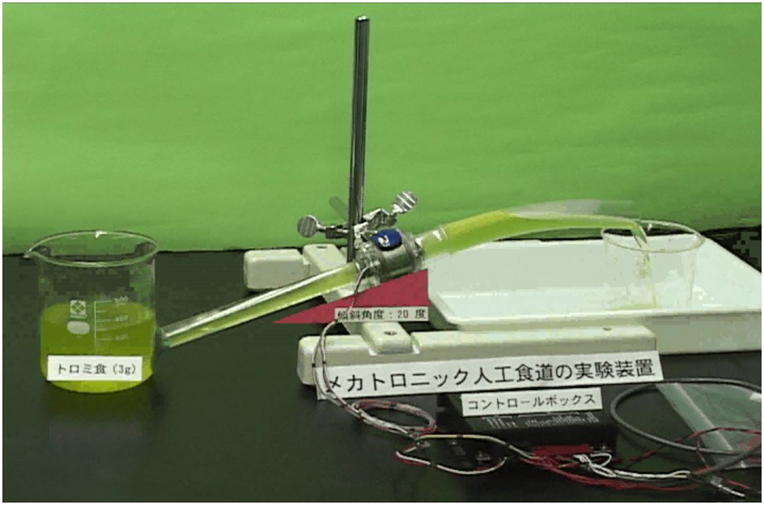
・ メカトロニック人工食道 (概要:PDF)
Copyright(c): SUZUKI Takahiro Lab., I I I / I I S, The University of Tokyo